info@bescomt.com
+86-13181986275
info@bescomt.com
+86-13181986275

Когда говорят про 6-осевой робот-манипулятор в нашей сфере — обработке листового металла и штамповке — часто сразу думают о сварке или сборке. Но это, пожалуй, самый распространённый поверхностный взгляд. На деле его роль в автоматизации подачи, разгрузки и даже в связке с тем же гибочным станком куда интереснее и сложнее. Многие заказчики изначально полагают, что купил робот, установил — и всё пошло. А потом выясняется, что траектории для извлечения штампованной детали из пресса или аккуратного позиционирования на конвейере требуют таких тонких настроек и учёта массы нюансов, что без глубокого понимания процесса не обойтись. Я сам через это проходил, и не раз.
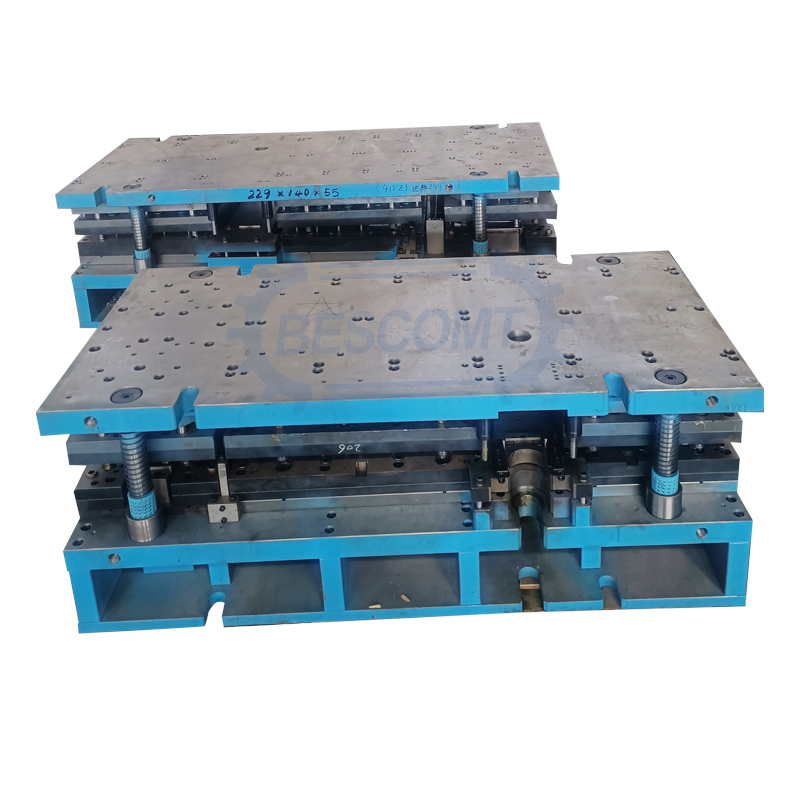
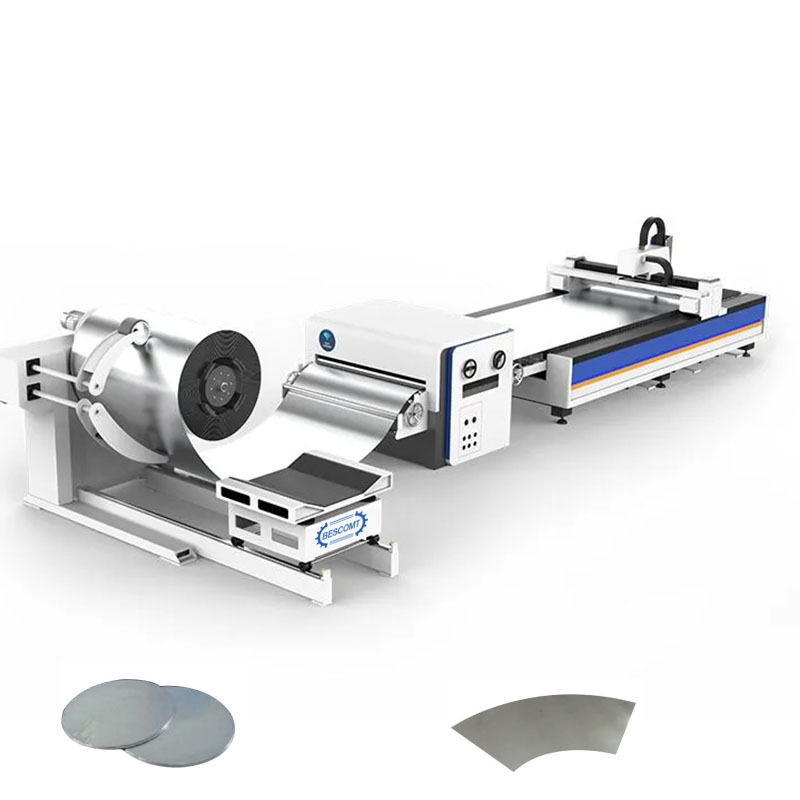
Если брать конкретно наш опыт в Besco Machine Tool Limited, то внедрение 6-осевых манипуляторов редко было изолированным проектом ?под ключ?. Чаще это часть комплексного решения, тот самый ?последний метр? автоматизации, который соединяет разрозненное оборудование в линию. Например, линия резки и штамповки. С одной стороны — гидравлический пресс или механические ножницы, с другой — система складирования или следующий технологический передел. Вот в этом промежутке робот и оказывается незаменим.
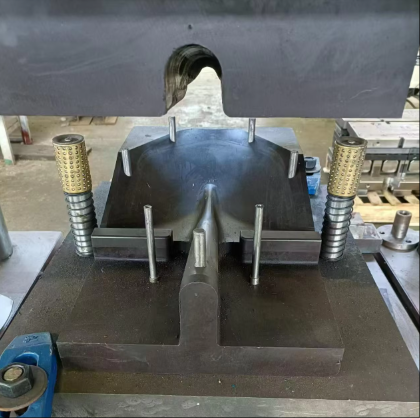
Помню один проект для завода в Тульской области. Там стояла задача автоматизировать разгрузку деталей после вырубного пресса. Детали были сложной формы, с острыми кромками, и их нужно было не просто снять, а аккуратно уложить в паллету в несколько слоёв с прокладками. Стандартные решения с пневматическими захватами не подходили — повреждали покрытие. Пришлось совместно с инженерами клиента разрабатывать специализированную схватку с адаптивным хватом и системой датчиков усилия. И вот тут как раз проявилась вся гибкость 6-осевой кинематики — чтобы обойти пресс-форму, развернуть деталь в воздухе и положить точно в ячейку, нужны были все степени свободы.
Это к слову о распространённом заблуждении, что чем больше осей, тем лучше для любой задачи. В той же паллетизации иногда хватает и 4-осевого SCARA. Но когда речь идёт о работе в стеснённых условиях штамповочного цеха, где оборудование стоит плотно, а траектория подвода должна обходить массу препятствий — станины пресса, системы охлаждения, трубопроводы — вот тогда шестая ось, обеспечивающая вращение вокруг кисти, становится не роскошью, а необходимостью. Без неё просто физически не вписаться в нужную точку под нужным углом.
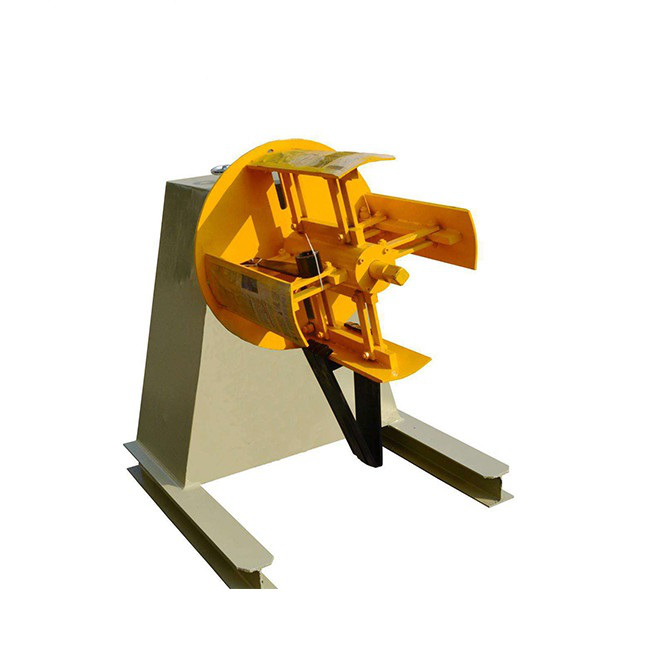
Казалось бы, подключил робота к контроллеру пресса по Profinet или EtherCAT, написал программу — и работай. В реальности всё упирается в синхронизацию. Цикл штамповки — это жёсткий тайминг. Робот должен успеть войти в зону, взять деталь и выйти ровно в тот момент, когда пресс начинает следующий ход. Задержка в миллисекунды может привести либо к простою, либо к катастрофе — столкновению. Мы настраивали это на линиях с автоматической подачей рулонной стали, где наш робот-манипулятор обслуживал сразу несколько прессов в карусельном режиме.
Ещё один больной вопрос — это периферия. Сам по себе робот — это ?рука?. Ему нужны ?глаза? и ?мозг?. Системы технического зрения для распознавания положения детали (которая после штампа может сместиться или даже перевернуться), датчики поиска кромки, сложные схватки (грейферы) под конкретную геометрию — всё это составляет львиную долю стоимости и сложности проекта. Часто клиенты, просматривая сайты вроде нашего https://www.bescomt.ru, видят готовые линии и не до конца осознают, что каждая такая интеграция — это индивидуальная инженерная работа.
Был у нас и откровенно неудачный опыт на раннем этапе, лет семь назад. Попытались использовать относительно лёгкого 6-осевого робота для снятия тяжёлых поковок с молота. Расчёт был на точность позиционирования. Но не учли вибрации от самого молота и ударные нагрузки при захвате раскалённой заготовки. Эндоффлектор не выдержал, появился люфт в редукторах. Пришлось признать ошибку и переходить на специализированные манипуляторы с жёсткой конструкцией. Этот урок хорошо запомнился: не всякая задача по силам артикулированному роботу, иногда нужен ?грузовик?, а не ?спортивный автомобиль?.
Современные интерфейсы программирования, конечно, стали дружелюбнее. Teach-пен, drag&drop-программирование. Но когда дело доходит до оптимизации цикла для максимальной производительности, чтобы выжать из линии лишние несколько деталей в час, без погружения в код и тонкой настройки скоростей, ускорений и траекторий не обойтись. Особенно критичны точки остановки и разворота — именно там происходит основной износ механических частей. Иногда лучше добавить лишнюю секунду на цикл, но обеспечить плавное движение, чем гнаться за скоростью и менять редукторы через полгода.
В этом плане политика нашей компании Besco Machine Tool Limited, с её упором на обучение персонала и регулярные тренинги, очень правильная. Оператор-наладчик, который понимает не только как нажать кнопку ?старт?, но и как скорректировать программу под износ штампа или новую партию материала с другими свойствами, — бесценен. Потому что робот — это не автомат, он требует внимания и понимания. Он должен адаптироваться под меняющиеся условия цеха, а не наоборот.
Часто спрашивают про выбор бренда. Fanuc, KUKA, ABB — все они имеют модели для тяжёлых условий цеха (Foundry Plus, IP67 и т.д.). Но мой субъективный опыт подсказывает, что для задач подачи/разгрузки в штамповочном производстве иногда более важна не максимальная грузоподъёмность, а надёжность и ремонтопригодность в условиях запылённости и вибрации. И наличие сильной локальной сервисной поддержки. Мы, как интегратор, который ?объединяет исследования и разработки, производство и продажу?, всегда смотрим на проект комплексно: какое у клиента основное оборудование, какой планируется фонд рабочего времени, какие есть сервисные риски.
Сейчас явный тренд — это не просто робот, а робот как узел в единой цифровой экосистеме цеха. Передача данных о количестве циклов, предупредительная диагностика износа подшипников, интеграция с MES-системой для учёта выработки. В наших разрабатываемых комплектах решений для производственных линий штамповки металла это уже закладывается. 6-осевой манипулятор становится источником ценных данных, а не просто исполнительным механизмом.
Ещё одно интересное направление — это коллаборация. Но в нашем контексте — не с человеком (опасная зона у пресса — не место для cobot’а), а с другим оборудованием. Например, тандем из двух роботов, один из которых занимается подачей заготовки, а второй — одновременной разгрузкой и первичной дефектовкой с помощью зрения. Или интеграция робота в линию с механическими ножницами, где он не только снимает отрезанный лист, но и маркирует его лазером по ходу движения.
Вернёмся к началу. Цель ведь не в том, чтобы поставить робота и написать об этом в отчёте. Цель — в увеличении общей эффективности оборудования (OEE) линии, в снижении брака от ручного обращения, в выводе людей из монотонных и опасных операций. И здесь 6-осевой робот-манипулятор — превосходный инструмент, но всего лишь инструмент. Его успех определяется не спецификациями, а тем, насколько глубоко инженеры-интеграторы вроде нас из Besco вникли в технологию клиента и подобрали решение под его конкретную боль, а не под модное слово ?автоматизация?. Как говорится, дьявол — в деталях, а в нашем деле эти детали часто оказываются где-то между шестой осью манипулятора и прижимной балкой гидравлического пресса.