info@bescomt.com
+86-13181986275
info@bescomt.com
+86-13181986275

Если говорить о 5-осевом роботе-манипуляторе в нашей сфере — автоматизации кузнечно-штамповочных операций — то сразу всплывает распространённое заблуждение. Многие считают, что главное — это количество степеней свободы, мол, пять осей — и любую сложную деталь можно обработать. На деле же, ключевой момент часто не в самом манипуляторе, а в том, как он интегрирован в линию, как работает с конкретным оборудованием, тем же гибочным станком или гидравлическим прессом. И здесь уже начинаются нюансы, о которых редко пишут в каталогах.
Когда мы начинали внедрять решения с 5-осевыми манипуляторами для клиентов, ориентируясь на ассортимент, представленный, например, на Bescomt.ru, то столкнулись с классической проблемой. В спецификациях всё идеально: точность позиционирования, грузоподъёмность, радиус действия. Но при стыковке робота с, допустим, автоматической системой подачи к механическим ножницам, выяснялось, что траектория подхода и захвата заготовки критично зависит от её деформации после предыдущей операции. Робот-то работает в идеальной цифровой модели, а металл — материал живой, с пружинением.
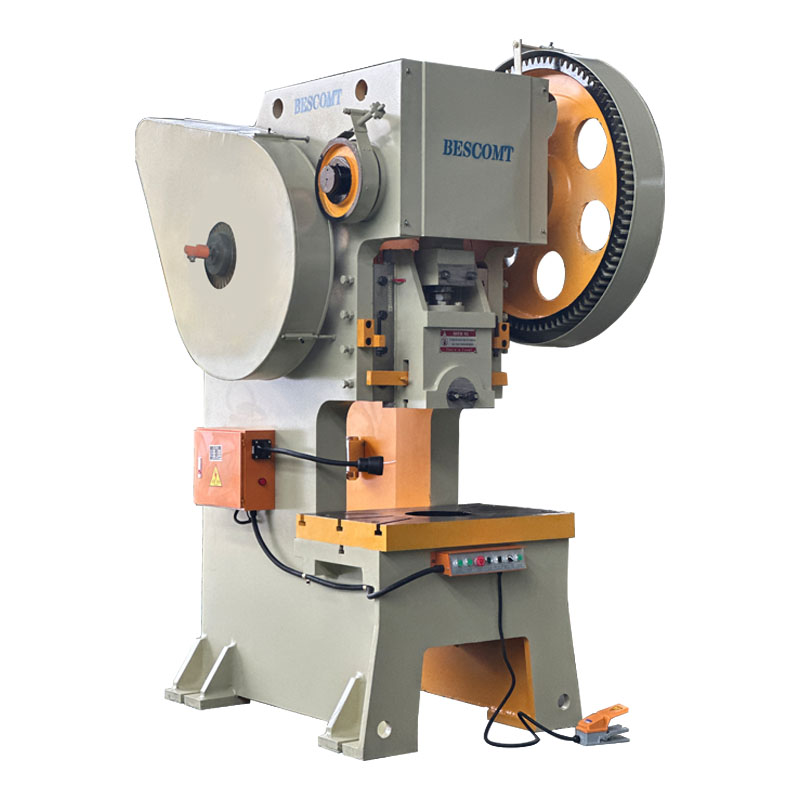
Был случай на одном из объектов, где мы использовали комплексное решение от Dongying Besco Machine Tool Limited — линию с штамповочным станком и манипулятором. По проекту, робот должен был брать плоскую заготовку со стеллажа и позиционировать её в пресс. На практике же, после лазерной резки на разделительной линии, края детали иногда имели микроскопические заусенцы. Этого было достаточно, чтобы вакуумная присоска на конце эффектора потеряла герметичность. Пришлось на ходу дорабатывать схему захвата, добавляя механические фиксаторы как страховку. Это тот самый момент, когда двадцать лет опыта компании в оснащении профессиональным фрезерным и другим оборудованием превращаются не просто в строчку в резюме, а в способность оперативно предложить модификацию.
Отсюда и мой главный вывод: оценивая 5-осевой робот, нужно смотреть не на него изолированно, а на его ?умение? компенсировать неидеальность реального производства. Гибкость программного обеспечения, возможность легко прописывать корректировки траектории по силовому воздействию (force control) — вот что часто становится решающим фактором, а не паспортная скорость повторного позиционирования.
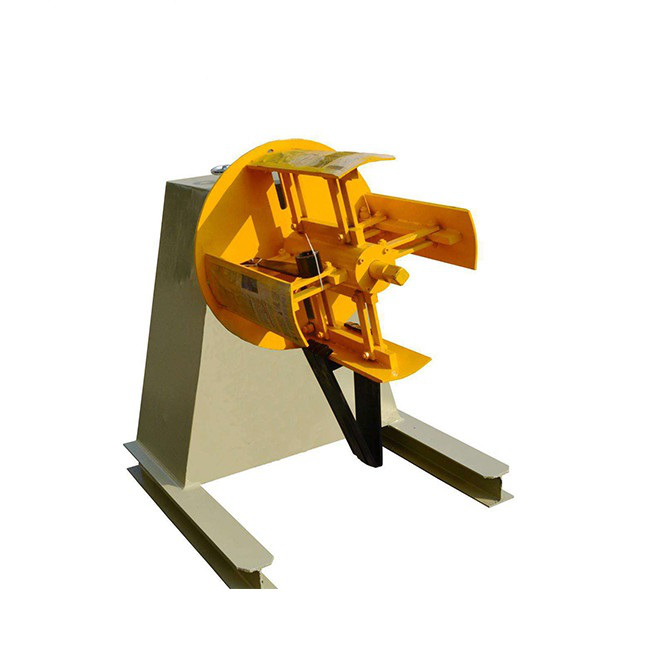
Компания Besco Machine Tool Limited позиционирует себя как разработчика комплектных решений для производственных линий. И здесь интеграция робота — это лакмусовая бумажка. Взять, к примеру, задачу по переносу детали от гибочного станка к рулонному. Казалось бы, стандартная операция. Но если гибка была сложной, с несколькими перегибами, деталь может иметь остаточные напряжения и незначительно менять геометрию после разгрузки. 5-осевой манипулятор с обычным жёстким алгоритмом попытается вставить её в валки рулонного станка по расчётным координатам — и будет коллизия.
Удачной практикой, которую мы переняли, работая с подобными технологическими компаниями, объединяющими R&D и производство, стало использование совмещённого управления. Система зрения, пусть даже простая 2D-камера, устанавливаемая на конце эффектора, делала предварительный скан ключевых точек детали после гибки. Коррекция вносилась в реальном времени. Это не было прописано в изначальном ТЗ, это родилось из необходимости. И это как раз про ?добросовестность и солидарность? инженеров на местах, о которых говорится в описании компании, — чтобы довести систему до ума, а не просто отгрузить по списку.
Ещё один аспект — безопасность и эргономика. Внедряя робота на площадке в 14 000 кв. м, нельзя просто поставить клетку вокруг него. Нужно продумать логистику: как оператор будет проводить переналадку, как обслуживать соседний гидравлический пресс. Часто эффективнее оказывается не один мощный робот-манипулятор, а два менее грузоподъёмных, работающих в тандеме, но освобождающих проходы. Такие решения требуют глубокого понимания всего технологического потока, а не только робототехники.
Говоря о профессиональном оборудовании, нельзя обойти стороной софт. Многие поставщики роботов предлагают свои проприетарные среды программирования. Они мощные, но для технолога на заводе по обработке листового металла, привыкшего к ЧПУ станков, это может стать барьером. Одна из удачных находок — когда интегратор (в нашем контексте — такой как Besco) предоставляет упрощённый интерфейс, где основные операции (взять, переместить, вставить, отклонить по усилию) представляются в виде готовых блоков или макросов.
Это резко снижает порог вхождения для персонала. Компании, которые уделяют внимание регулярным тренингам, как отмечено в описании Besco, получают здесь двойное преимущество. Обученный оператор может не просто нажимать кнопки, а самостоятельно вносить мелкие корректировки в программы для 5-осевого манипулятора под конкретную партию изделий. Это превращает робота из ?чёрного ящика? в гибкий инструмент.
Помню, как на одном из запусков оператор, прошедший такое обучение, заметил, что при захвате крупногабаритного листа робот делает лишнюю паузу перед началом движения. Оказалось, что в программе по умолчанию был заложен консервативный таймаут на стабилизацию вакуума. Для тонкого листа это актуально, а для толстого — нет. Он смог самостоятельно уменьшить эту задержку, сократив цикл на несколько секунд. Мелочь? На масштабе тысяч циклов в день — существенная экономия. Это и есть синергия надежного оборудования и грамотного персонала.
Не каждый технологический процесс требует именно 5-осевого робота. Частая ошибка — гнаться за максимальной сложностью. В обработке листового металла множество операций — подача в ножницы, перенос между прессами — эффективно решаются 4-осевыми или даже портальными системами. Пятая ось, а особенно шестая (но это уже другая история), критически важна для пространственной ориентации детали, например, при установке сложно-гнутой заготовки в пресс-форму под нестандартным углом или для сварки объёмных конструкций.
При анализе проекта мы всегда задаём вопрос: ?Какие операции требуют изменения ориентации детали в пространстве без перезахвата??. Если таких операций в цикле меньше 20%, стоит серьёзно подумать о более простом и, что важно, более ремонтопригодном и дешёвом в обслуживании решении. Нацеленность стать лучшим поставщиком для автоматизации, как заявлено Besco Machine Tool Limited, подразумевает и эту честность перед клиентом — не продавать избыточную технологию, а предлагать оптимальную.
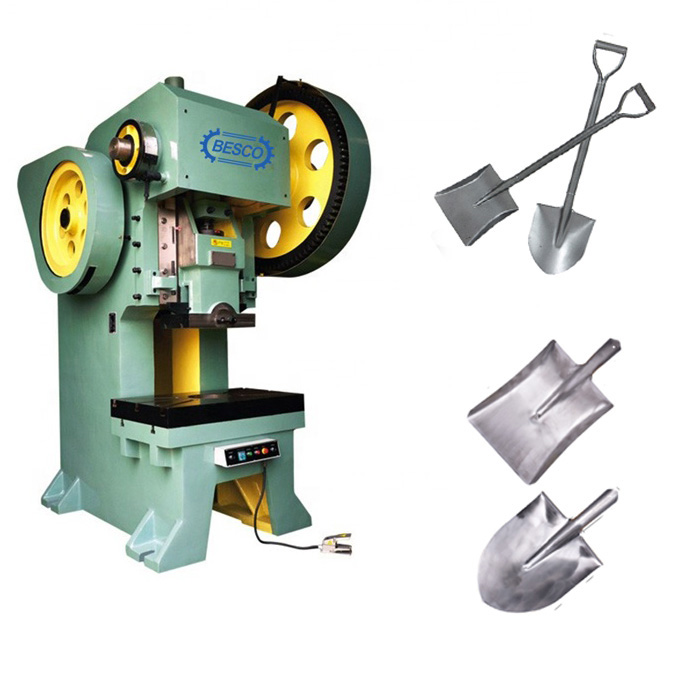
У нас был опыт, когда для линии по производству корпусных деталей изначально закладывался дорогой 5-осевой манипулятор. Но после детального анализа техпроцесса выяснилось, что все необходимые углы подхода можно обеспечить, грамотно спроектировав поворотные устройства (позиционеры) рядом со станками. Робот остался 4-осевым, а сэкономленные средства вложили в более точную систему зрения. Надежность всей линии в итоге оказалась выше из-за меньшего количества сложных подвижных элементов в самом манипуляторе.
Куда движется тема? На мой взгляд, ключевой тренд — не наращивание количества осей или скорости, а увеличение адаптивности на основе данных. 5-осевой робот-манипулятор всё чаще выступает не как исполнительное, а как измерительное и корректирующее звено. Он может, выполняя программу, собирать данные об усилиях на эффекторе, о фактических траекториях, о вибрациях.
Эти данные, аккумулируемые на уровне всей линии (штамповочный станок, ножницы, пресс), позволяют перейти к предиктивному обслуживанию. Например, если робот фиксирует постепенное увеличение усилия при установке детали в одну и ту же оснастку пресса, это может сигнализировать о начале износа направляющих или о накоплении технологической грязи. Раньше об этом узнавали по браку или поломке. Теперь можно спланировать обслуживание между сменами.
Для компании, которая, как Besco, разрабатывает различные комплекты решений, это открывает путь к предложению не просто ?железа?, а цифровых сервисов. Робот становится источником ценной информации о процессе, помогая клиенту не только автоматизировать, но и оптимизировать производство. И вот здесь сочетание опыта в механике, как у Besco с её станочным парком, и современных средств автоматизации даёт наиболее весомый результат. Это уже не просто замена человека на монотонной операции, а создание гибкой, самонастраивающейся производственной ячейки. К этому, по-моему, всё и идёт.