info@bescomt.com
+86-13181986275
info@bescomt.com
+86-13181986275

Когда говорят про 4-осевой робот-манипулятор для автоматизации штамповки, многие сразу представляют себе универсальное и дешевое решение. Вот тут и кроется первый подводный камень. Четыре оси — это не недостаток, а часто осознанный выбор для конкретных, повторяющихся операций: выгрузка детали из пресса, перенос между станциями, укладка в паллет. Но если нужно развернуть деталь под сложным углом для следующего гибочного перехода — тут уже начинаются компромиссы. Самый частый запрос от клиентов: ?нам нужен недорогой робот для подачи заготовок в пресс?. Звучит просто, пока не начинаешь считать циклы, смотреть на габариты детали и точность позиционирования после хода ползуна.
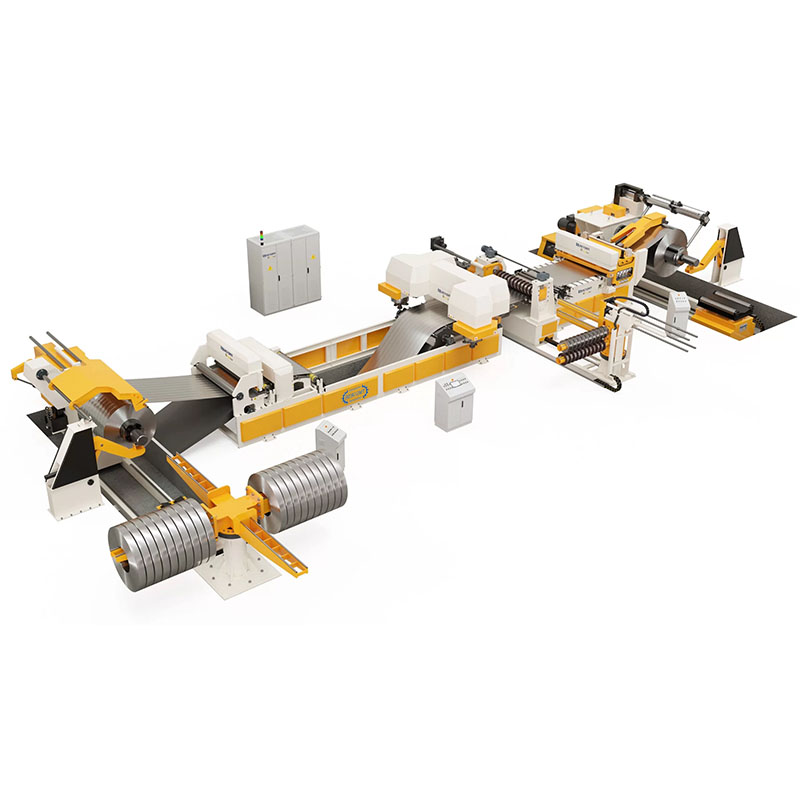
В контексте линий для обработки листового металла, которые, к примеру, проектирует и комплектует Besco Machine Tool Limited, выбор часто падает на 4-осевые модели. Их профиль — это, условно, ?большой охват, тяжелый груз, повторяемый маршрут?. Представьте линию, где после гидравлического пресса нужно быстро снять крупногабаритную деталь и переместить её на рольганг или в штабель. Шестая ось, дающая бесконечное вращение вокруг своей оси, здесь часто избыточна. Деталь плоская, её ориентация в пространстве не меняется. Зато важны скорость, надежность и, что критично, простота программирования оператором цеха, а не инженером-робототехником.
Однако был у нас опыт, когда попытались сэкономить и поставить 4-осевой манипулятор на операцию переворота детали между двумя гибочными станками. Идея была в том, чтобы использовать захват с пневмоповоротом на 180 градусов — своего рода ?пятая ось? на эффекторе. В теории всё работало. На практике же, из-за люфтов в механике захвата и инерции самой детали, позиционирование после переворота ?гуляло? на пару миллиметров. Для гибки с высокой точностью — это брак. Пришлось пересматривать концепцию и либо дорабатывать захват с сервоприводом (что сводило на нет экономию), либо ставить 6-осевого ?коллегу? на этот участок. Это был хороший урок: 4 оси — это не ?урезанный? 6-осевой робот, а инструмент для своих задач.
Кстати, о задачах. На площадке Besco, где площадь завода под 14 000 кв. м и есть своё станочное парк, тестирование таких сценариев — обычная практика. Видел, как их инженеры ?гоняют? манипулятор с разными типами захватов — вакуумными, магнитными, механическими — подбирая конфигурацию под реальную деталь. Это не лабораторные условия, тут сразу видно, как ведёт себя система под нагрузкой в течение сотен циклов.
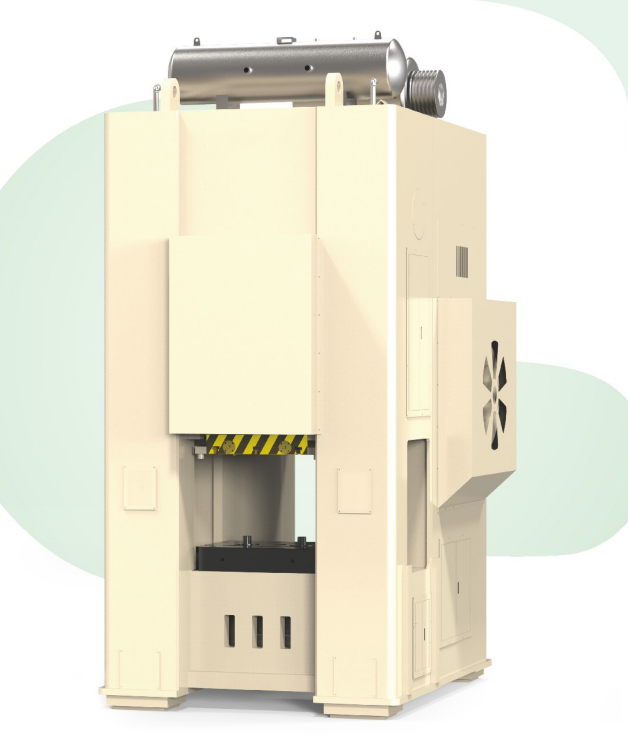
Самая большая головная боль — это не сам 4-осевой робот-манипулятор, а его встройка в существующий технологический процесс. Допустим, есть линия из механических ножниц, гибочного станка и пресса. Робот должен обслуживать все эти модули. И вот тут возникает масса нюансов. Синхронизация с тактом пресса — чтобы не было ситуации, когда ползун уже идет вниз, а манипулятор ещё не вышел из зоны. Организация безопасных зон и световых барьеров. Разработка программы, которая не просто перемещает деталь из точки А в Б, а учитывает возможные осечки: если деталь прилипла к пресс-форме, если датчик на захвате не сработал.
Помню проект для одного из цехов, где как раз использовалось оборудование Besco. Нужно было автоматизировать выгрузку после штамповочного станка. Робот стоял на линейной направляющей (7-я ось), чтобы обслуживать несколько прессов. Казалось бы, классика. Но столкнулись с проблемой вибрации. При движении по направляющей на высокой скорости и с массой под 100 кг, в момент остановки возникала раскачка захвата с деталью. Пришлось дорабатывать алгоритмы разгона и торможения, снижать максимальную скорость на последнем участке траектории. Потеряли доли секунды на цикле, но выиграли в точности и, главное, в надежности. Такие тонкости никогда не пишут в каталогах.
Ещё один момент — это ?обучение? персонала. Фраза из описания Besco про регулярные тренинги — это не для галочки. Оператору, привыкшему работать вручную, нужно объяснить не только как нажать кнопку ?старт?, но и как интерпретировать ошибки, как выполнить переналадку на новую деталь, как провести базовое ТО. Часто программы для 4-осевых роботов делают максимально интуитивными, с интерфейсом на сенсорной панели, где можно просто указать точки захвата и сброса. Но без понимания физики процесса оператор беспомощен в нештатной ситуации.
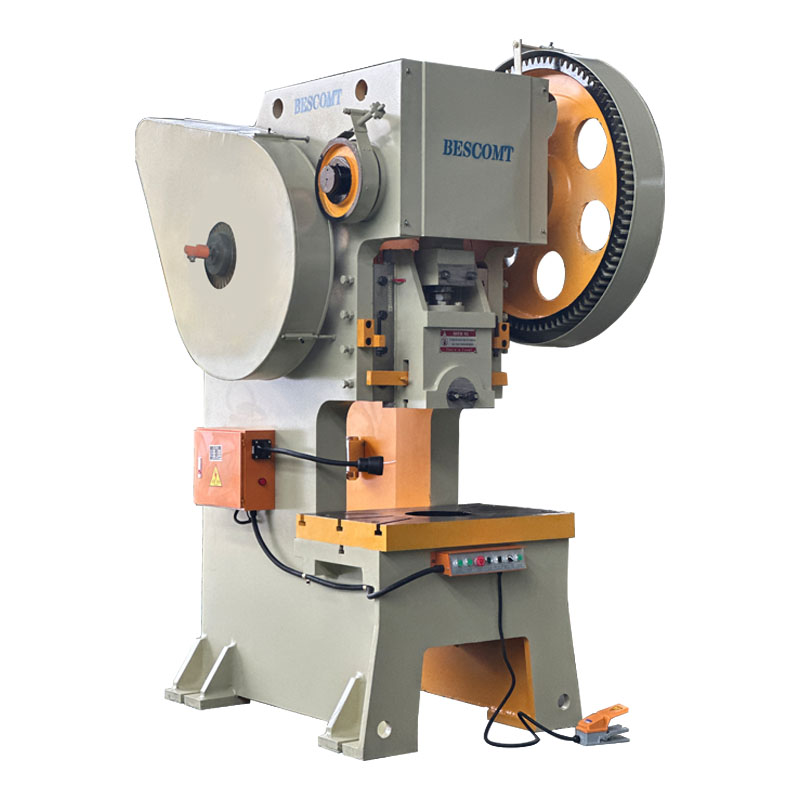
Иногда спор ?робот vs специализированный автомат подачи? решается не в пользу робота. 4-осевой манипулятор — гибкий, его можно перпрограммировать. Но если речь идет о высокоскоростной подаче мелких одинаковых заготовок в пресс с частотой, скажем, 60 ходов в минуту, то кинематика робота может не вытянуть. Специализированный пневмо- или сервоприводной податчик будет и быстрее, и, возможно, дешевле в такой конфигурации.
Но сила робота проявляется там, где есть вариативность. Например, в комплексах, которые Besco называет ?различные комплекты решений для производственных линий?. Сегодня линия штампует одну деталь, завтра — другую, с иными габаритами и точками захвата. С роботом переналадка — это загрузка новой программы и смена оснастки на захвате. Со специализированным автоматом — часто механическая перестройка, которая может занять часы. Вот здесь 4 оси с их достаточной свободой и относительно невысокой стоимостью входа дают огромное преимущество для средних и мелкосерийных производств.
Надо отдать должное, что некоторые производители роботов делают модели, заточенные именно под штамповку. У них усиленная конструкция, защита от вибрации и металлической пыли, предустановленные программные шаблоны для работы с прессами. Это уже не универсальный робот, а скорее специализированный инструмент, что стирает грань в споре о выборе.
Современные контроллеры для 4-осевых роботов предлагают два пути. Первый — это обучение ?вождением?: оператор физически перемещает манипулятор, записывая ключевые точки. Второй — офлайн-программирование на компьютере. Для повторяющихся операций в штамповке часто используют первый метод, он быстрее и нагляднее для технолога на месте. Но когда траектория сложная или нужно минимизировать простое оборудования для обучения, без офлайн-системы не обойтись.
Проблема в том, что симуляция в идеальном цифровом мире не всегда учитывает все нюансы. Тот же прогиб длинной детали на захвате или упругие деформации в самом манипуляторе под нагрузкой. Поэтому итоговую ?притирку? программы всё равно делают на реальном объекте. Часто вижу, как инженеры вносят поправки в несколько миллиметров прямо с teach-панели, глядя на лазерную метку на детали. Это рутина, но без неё не добиться стабильного качества.
Интересно, что для 4-осевых конфигураций часто используют не полные аналоги CAD-систем, а упрощенные среды, где основная модель — это уже готовая ячейка с прессом и роботом. Пользователь просто задаёт габариты детали и точки операций. Такие решения продвигают компании-интеграторы, чтобы снизить порог входа для клиентов. Это разумный подход, особенно если компания, как Besco, стремится быть ?лучшим в мире поставщиком для автоматизации производства листового металла?. Им важна не продажа робота как такового, а продажа рабочей, отлаженной ячейки ?под ключ?.
Судя по тенденциям, 4-осевой робот-манипулятор не уйдёт со сцены в области штамповки. Его ниша — тяжелые, линейные операции — останется востребованной. Но меняется ?начинка?. Всё больше встраивают интеллектуальные системы технического зрения. Не для сложного 3D-сканирования, а для простых, но критичных задач: проверить, взята ли деталь, определить её смещение в штабеле, проконтролировать наличие отверстия после штамповки. Для 4-осевого робота это означает возможность компенсировать неточности позиционирования заготовки без сложной механической дозации.
Другое направление — коллаборация. Пока что 4-осевые манипуляторы редко делают в коллаборативном исполнении из-за высоких масс и скоростей. Но идея безопасного совместного работы человека и робота в одной клетке без тяжёлых ограждений проникает и сюда. Возможно, появятся модели с усиленным мониторингом усилия и более мягкими алгоритмами остановки.
В конечном счете, выбор всегда за технологией. Робот — это всего лишь исполнительное звено. Его эффективность определяет грамотное проектирование всей линии: от подающего рольганга до системы утилизации отходов. И здесь опыт компаний, которые десятилетиями, как Besco, занимаются именно кузнечно-прессовым оборудованием, оказывается бесценным. Они смотрят на робота не как на чудо-технику, а как на один из модулей, который должен безотказно работать в жёстких условиях цеха годами. И именно этот прагматичный взгляд, а не рекламные лозунги, в итоге и решает, будет ли автоматизация успешной.