info@bescomt.com
+86-13181986275
info@bescomt.com
+86-13181986275

Когда говорят про 3-осевой робот-манипулятор для автоматизации, многие сразу представляют себе что-то вроде сборочных линий в автостроении — сложные траектории, шесть степеней свободы. Но в обработке листового металла, особенно в штамповке, часто нужна не максимальная гибкость, а надежность, скорость и, что важно, простота интеграции в существующую механику. Вот тут-то трехосевые системы, по моему опыту, оказываются часто идеальным решением, хотя и недооцененным. Много раз видел, как пытаются впихнуть шестиосевого робота в задачу подачи заготовок в пресс, а потом месяцами отлаживают и страдают от его ?интеллектуальности? там, где нужна просто точная повторяемость по X, Y и Z.
Если взять типичную линию, скажем, для производства корпусов или кронштейнов, то последовательность часто жестко фиксирована: взять плоскую заготовку из стопы, точно позиционировать ее под пресс, после выштамповки — вынуть и сложить в паллет или передать дальше. Траектория здесь — по сути, прямоугольник. Добавлять вращательные оси — это лишние сервоприводы, лишние точки отказа, усложнение программирования и, что критично, снижение быстродействия. 3-осевой манипулятор в такой схеме — это, по сути, мостовой кран с ЧПУ, но адаптированный под жесткие условия цеха: ударные нагрузки от пресса, металлическая пыль, вибрация.
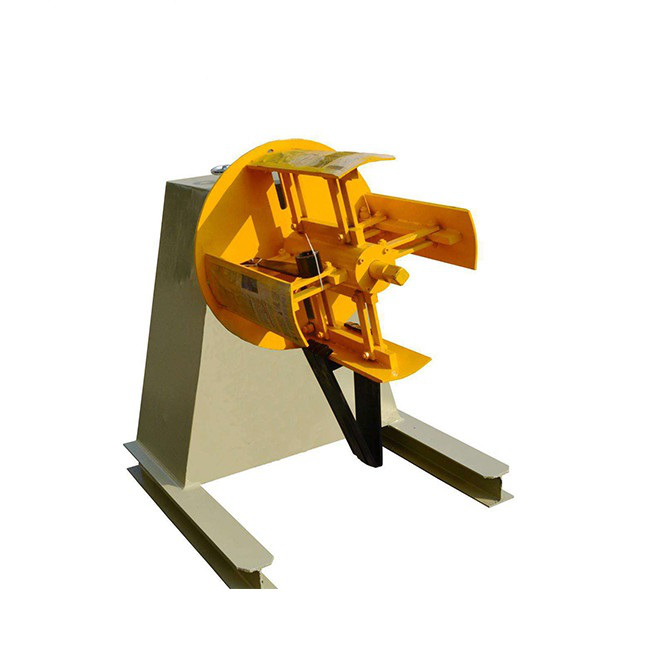
Я помню один проект для клиента, который производил элементы вентиляции. У них был старый гидравлический пресс и два рабочих, которые вручную подавали листы. Задача была — автоматизировать без остановки производства на месяц и без бюджета под ?роботизированный остров?. Мы остановились на портальном 3-осевом манипуляторе с пневматическим захватом. Ключевым было не просто купить железо, а спроектировать систему так, чтобы робот занимал минимум места и мог ?подъехать? к стопе заготовок сбоку от пресса. Это кажется мелочью, но в тесном цехе каждый сантиметр на счету.
И вот тут часто возникает первая проблема: жесткость портала. Для скоростной подачи листа весом, допустим, 15-20 кг, с ускорением и резким торможением, балка может ?играть?. Если производитель сэкономил на материалах или конструкции, точность позиционирования на последних метрах траектории будет плясать, и заготовка ляжет в пресс со смещением. Приходится либо усиливать конструкцию постфактум (кошмар!), либо сразу выбирать поставщика, который понимает эти нагрузки. В контексте компании, которая занимается комплексными решениями, как Besco Machine Tool Limited, такой опыт уже заложен в проектирование — они знают, что их оборудование, будь то гибочный станок или линия резки, будет работать в паре с таким манипулятором, и заранее закладывают интерфейсы и требования по жесткости основания.
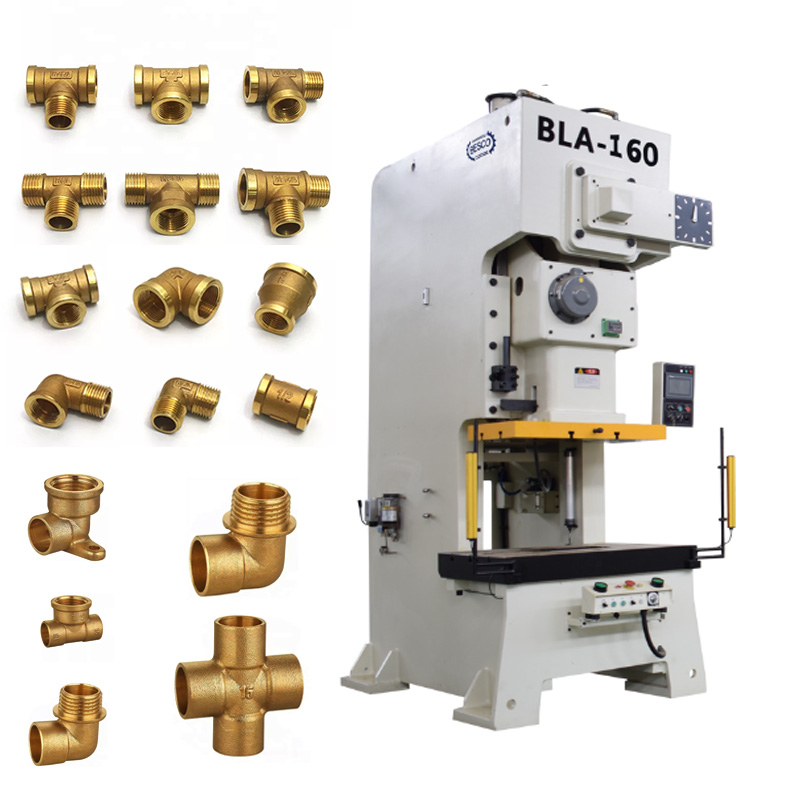
Самое интересное (и сложное) начинается не когда робот уже стоит в цеху, а когда его нужно ?подружить? с остальным оборудованием. Допустим, у вас линия от Besco: механические ножницы, затем штамповочный пресс, потом, возможно, гибочный станок. 3-осевой манипулятор должен синхронизироваться с тактом каждого. Пресс — самый критичный партнер. Нужно не просто успеть вынуть деталь, а сделать это в строго отведенное ?окно?, когда ползун поднялся на безопасную высоту, и до начала следующего хода. Здесь программная часть — это половина успеха. Часто используют внешний контроллер, который получает сигналы от датчиков пресса и управляет роботом.
Однажды мы столкнулись с задержкой сигнала от старого пресса. Робот, получая сигнал ?пресс открыт? с опозданием в 200 мс, начинал движение чуть позже и не успевал за тактом. Казалось бы, мелочь. Но на 800 ходах в час эти 200 мс складывались в простой. Решение было не в перепрошивке робота, а в установке дополнительного независимого датчика положения ползуна. Это тот случай, когда теоретическая схема из каталога разбивается о реальную физику старого оборудования.
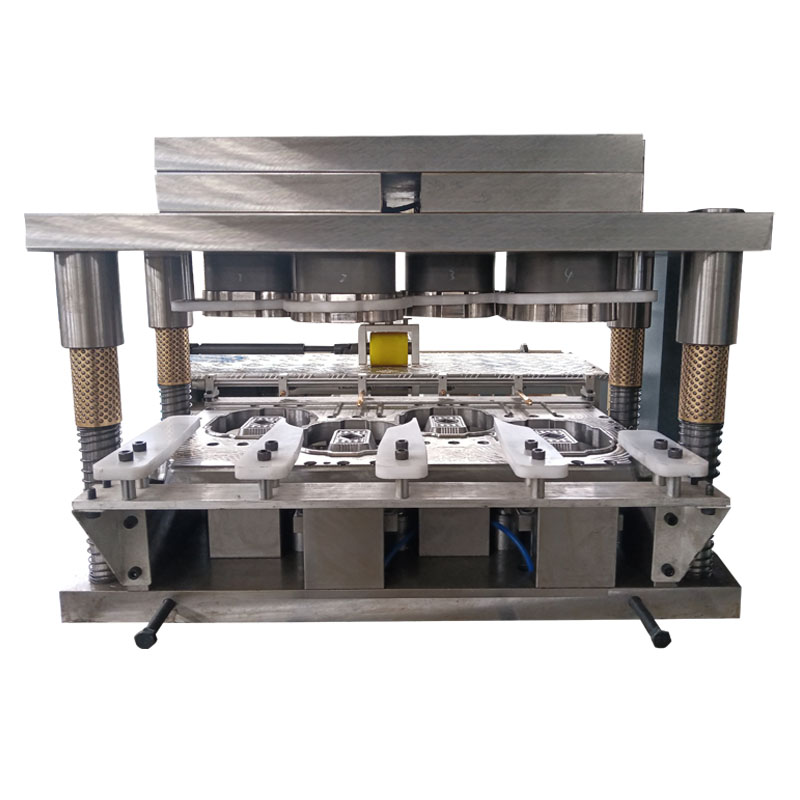
Еще один нюанс — захватное устройство. Для плоского листа часто используют вакуумные присоски. Но если лист покрыт маслом для штамповки или имеет перфорацию, вакуум может ?сорваться?. Приходится комбинировать: вакуум по краям и механические зажимы по центру. Или, как вариант, использовать электромагнитный захват, но это уже дополнительные требования к материалу и безопасности. В своих решениях Besco Machine Tool Limited, судя по опыту, часто предлагает модульный подход к системам подачи, где захват можно адаптировать под конкретную заготовку — это сильно экономит время на запуске.
Многие, кто работал с артикулированными роботами, ожидают аналогичной гибкости в программировании. Но здесь все иначе. Программа для 3-осевого робота-манипулятора — это чаще всего список точек в декартовой системе координат, привязанных к конкретным физическим объектам: стоп заготовок, матрица пресса, паллет. ?Обучение? сводится к ручному подводу захвата к этим точкам и их запоминанию. Звучит просто, но есть подводные камни.
Например, точка над стопой заготовок. Если заготовки кончились и подвезли новую стопу, ее высота может отличаться на пару сантиметров. Если в программе жестко прописана высота Z, робот либо врежется в верхний лист, либо будет пытаться схватить воздух. Поэтому правильно делать не одну точку, а две: точка подхода над стопой и точка захвата, которая корректируется датчиком касания или, что проще, сигналом от вакуумного датчика. Робот опускается, пока не ?почувствует? заготовку. Это элементарно, но сколько раз видел, как эту логику забывают прописать с первого раза.
Другой момент — траектория между точками. Чтобы минимизировать время цикла, нужно оптимизировать путь. Но если над прессом есть какие-то конструкции, нужно прописать промежуточные точки подъема, чтобы избежать столкновения. В шестиосевом роботе можно было бы просто обвести рукой манипулятором траекторию. Здесь же приходится вручную задавать эти точки, и это требует хорошего пространственного воображения у оператора. Иногда проще смонтировать камеру для проверки отсутствия препятствий, но это уже удорожание.
Если отбросить технические детали, главный вопрос для любого производства: окупится ли? 3-осевой манипулятор, как правило, дешевле в закупке и обслуживании, чем шестиосевой робот. Меньше подвижных частей — меньше износ. Электромеханика проще — ремонт могут провести штатные электрики цеха, не нужен выездной инженер от производителя роботов с ноутбуком и закрытым ПО. Для компании вроде Besco Machine Tool Limited, которая поставляет комплексные линии, это аргумент для клиента: снижение совокупной стоимости владения.
Надежность — отдельная тема. В условиях кузнечно-штамповочного цеха с его вибрацией и загрязнениями, чем проще конструкция, тем лучше. Подшипники качения на направляющих, защищенные кожухами, мощные сервоприводы с прямым приводом или редуктором — все это рассчитано на многочасовую работу без остановки. Я видел линии, где такие манипуляторы отрабатывали по три смены пять лет с минимальными простоями — только плановая замена щеток на сервомоторах и смазка направляющих.
Что же касается самого Besco, то их подход, судя по описанию и площадям завода в 14 000 кв. м, как раз и строится на глубокой интеграции. Они не просто продают пресс и отдельно робота. Они проектируют автоматическую систему подачи как часть единого технологического процесса. Это значит, что интерфейсы, крепления, электрические шкафы уже предусмотрены. Клиенту не нужно ломать голову, как состыковать оборудование от разных вендоров. Для инженера на месте это огромная экономия времени и нервов.
Конечно, 3-осевой робот-манипулятор — не панацея. Если задача требует переворота детали между операциями или точной ориентации под сложным углом, без дополнительной оси (например, вращающегося стола или поворотного устройства на самом захвате) не обойтись. Но часто это решается проще и дешевле внешней механикой, чем усложнением самого манипулятора.
Сейчас тренд — на увеличение скорости и ?интеллекта?. Простая замена рабочих на механическую руку уже не так интересна. Нужны системы машинного зрения для распознавания смещенной заготовки в стопе, адаптивные алгоритмы, которые компенсируют износ оснастки пресса, сбор данных для предиктивного обслуживания. И здесь трехосевые системы тоже эволюционируют — обрастают датчиками и возможностью подключения к промышленному IoT. Думаю, компании-интеграторы, которые, как Besco, имеют почти 20-летний опыт в автоматизации листового металла, будут двигаться именно в эту сторону: не просто продажа ?железа?, а поставка адаптивных, ?умных? производственных ячеек, где 3-осевой манипулятор — это исполнительное устройство в цифровом контуре управления.
В итоге, выбор всегда за конкретной задачей. Но глядя на множество успешных линий в металлообработке, можно сказать, что скромный 3-осевой робот-манипулятор — это часто самый разумный, прагматичный и живучий вариант. Он не претендует на звание высокотехнологичного чуда, он просто годами безотказно делает свою работу, и в этом его главная ценность для реального производства.