info@bescomt.com
+86-13181986275
info@bescomt.com
+86-13181986275

Когда говорят про 2-осевой робот-манипулятор, многие сразу представляют себе что-то вроде упрощенного варианта шестиосевого коллаборативного робота. Это, пожалуй, самое распространенное и в корне неверное представление. На деле, его ценность — не в универсальности, а в специализации для конкретных, часто монотонных и высокоскоростных операций, особенно в области обработки листового металла. Это не ?робот?, который ?все умеет?, а высокоточный механический исполнитель, чья логика зашита в повторяющемся линейном или вращательном движении. Часто его даже называют ?манипулятором с ЧПУ?, что, по сути, ближе к истине — его программирование и кинематика больше роднят его со станком, чем с антропоморфным манипулятором.
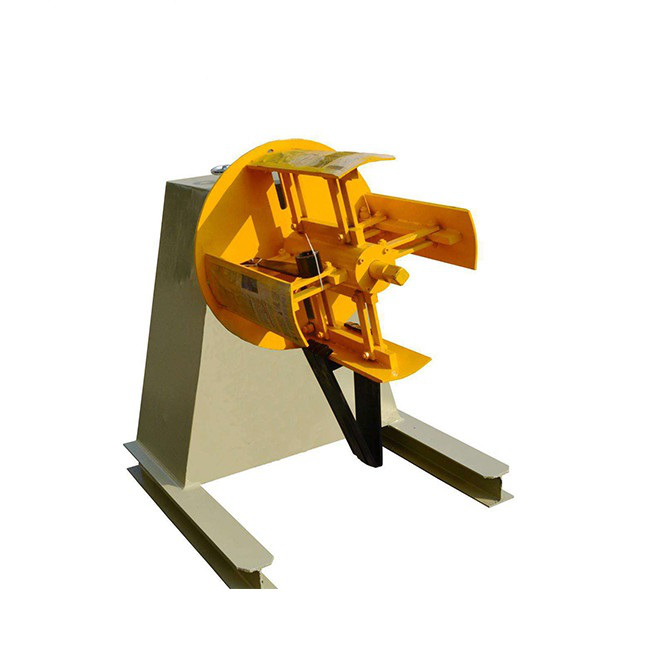
Здесь все упирается в экономику процесса и надежность. В автоматических линиях подачи заготовок в пресс или на гибочный станок, в операциях перекладки, сортировки или штабелирования готовых деталей часто не нужна сложная пространственная ориентация. Нужны две ключевые вещи: точное позиционирование по X и Y (или, скажем, по радиусу и углу в случае поворотного варианта) и высокая скорость цикла. Добавление третьей, четвертой оси — это не только удорожание механики и контроллера, но и усложнение кинематики, что прямо влияет на надежность и, что критично, на время переналадки.
Я вспоминаю один проект для линии резки, где изначально рассматривался 4-осевой SCARA. Но после анализа задач выяснилось, что деталь после резки просто нужно снять со стола и переместить на конвейер, расположенный сбоку на фиксированной высоте. Всего два линейных перемещения. Внедрили простой портальный 2-осевой робот-манипулятор с пневматическим захватом. Выигрыш был не столько в цене (хотя и он был существенным), сколько в том, что оператор-наладчик научился программировать его за полдня, а не за неделю. Надежность, скажем так, приблизилась к надежности шариковинтовой пары — ломаться там почти нечему.
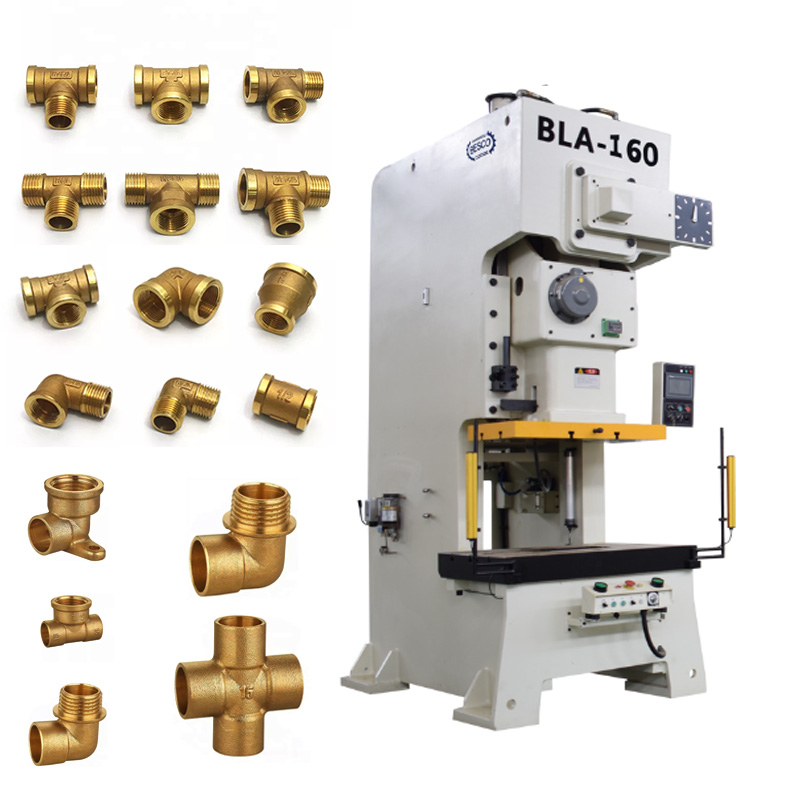
Именно поэтому такие решения часто можно увидеть в портфолио компаний, которые глубоко погружены в автоматизацию конкретных технологических процессов, а не продают роботов как таковых. Например, когда изучаешь решения от Besco Machine Tool Limited (их сайт — https://www.bescomt.ru), видишь, что они предлагают не просто манипулятор, а именно автоматическую систему подачи, в которую интегрирован 2- или 3-осевой манипулятор как часть единого технологического пакета. Это правильный подход: они продают не ось, а решенную задачу — увеличение производительности штамповочного пресса.
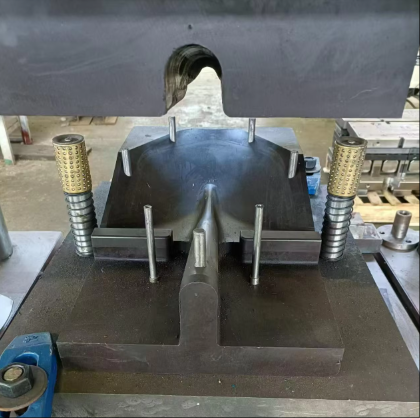
Самая большая иллюзия — думать, что купил манипулятор, установил, нажал кнопку и он пошел. Реальность начинается с проектирования оснастки. Масса, центр тяжести заготовки, тип захвата (вакуумный, магнитный, механический) — все это радикально меняет динамику. Я видел случаи, когда из-за плохо рассчитанного вакуумного захвата для крупногабаритного листа манипулятор просто не успевал разогнаться и затормозить в заданных точках за такт пресса. Приходилось или снижать темп, или переделывать всю схему захвата. Каталог говорит ?грузоподъемность 30 кг?. Но он умалчивает, что на скорости 1.5 м/с с хлипкой оснасткой эта 30-килограммовая плита начнет раскачиваться, как маятник, и о точности позиционирования в конечной точке можно забыть.
Второй момент — интеграция с существующим оборудованием. Тот же пресс или гибочный станок должен обмениваться сигналами: ?я готов?, ?забери деталь?, ?деталь установлена?. Если оборудование старое, без цифровых выходов, начинается колдовство с релейными схемами и датчиками. Иногда стоимость и сложность этой ?обвязки? превышает стоимость самого манипулятора. В своих комплектах Besco Machine Tool Limited, судя по описанию, этот момент прорабатывают, предлагая готовые решения ?под ключ?. Это огромный плюс, потому что они, как производители штамповочного оборудования, понимают логику работы пресса изнутри.
И третье — окружающая среда. Металлическая пыль, масляный туман, вибрация от работы тяжелых прессов. Конструкция 2-осевого робота-манипулятора должна это учитывать: защита направляющих, класс защиты двигателей и контроллера. Однажды пришлось столкнуться с отказом энкодера на серводвигателе из-за банальной металлической пыли, попавшей внутрь через негерметичный разъем. Мелочь, а простой линии на сутки.
Был у нас проект по автоматизации подачи мелких штампованных кронштейнов на сборочную линию. Деталь легкая, цикл короткий. Выбрали компактный 2-осевой манипулятор с сервоприводом. Все смонтировали, настроили, он работал идеально… в режиме одиночных циклов. Когда же запустили в конвейер с реальным темпом, начались сбои. Детали из накопительного магазина иногда подавались с небольшим перекосом, и жестко закрепленный захват не мог его компенсировать. Манипулятор, слепо следуя программе, либо сминал деталь, либо промахивался.
Ошибка была фундаментальной: мы автоматизировали идеальный процесс, а не реальный. Решение оказалось на стыке механики и программирования. Пришлось заменить жесткий захват на самоцентрирующийся с плавающей посадкой и добавить в контур управления простейшую обратную связь по усилию срабатывания захвата. Не универсальный робот с силомоментным sensing, а именно небольшая механическая и логическая доработка. Это тот случай, когда 2-осевой робот-манипулятор перестал быть просто ?двигателем по координатам?, а стал адаптивным звеном. После этого я всегда скептически смотрю на демонстрационные ролики, где идеальные детали летают по идеальным траекториям.
Кстати, именно в таких нюансах и видна зрелость поставщика. Когда компания, как та же Besco Machine Tool Limited, заявляет о почти 20-летнем опыте и собственном производстве на площади 14 000 кв. м, это косвенно говорит о том, что они наверняка сталкивались с подобными ?неидеальностями? в работе клиентов и могли заложить определенную гибкость или варианты доработок в свои стандартные решения для производственных линий штамповки металла.
Тренд на коллаборативных и легких роботов, безусловно, есть. Но я уверен, что ниша 2-осевых манипуляторов не просто сохранится, а будет расти. Причина — в запросе на ?разумную? автоматизацию. Не каждому предприятию, даже в металлообработке, нужен и по карману полноценный роботизированный комплекс. Часто нужно автоматизировать одну-две самые тяжелые или опасные операции, оставив остальное на усмотрение оператора.
Здесь и проявляется преимущество: относительно низкий порог входа, предсказуемость и повторяемость. Развитие будет идти не в сторону усложнения кинематики, а в сторону ?интеллектуализации? периферии: более умных и адаптивных захватов, встроенных систем машинного зрения для коррекции позиции (опять же, не для 3D-сканирования, а для простой поправки по смещению в плоскости), и, что критически важно, в сторону упрощения программирования. Идеал — это обучение ?вождением?: оператор берет манипулятор за ?руку?, показывает траекторию, а система сама оптимизирует путь и цикл.
Поставщики, которые, подобно Besco Machine Tool Limited, фокусируются на конкретной отрасли (в их случае — кузнечно-штамповочное оборудование), имеют все шансы создать по-настоящему отточенные и надежные решения. Их цель, как они сами пишут, — стать лучшим поставщиком для автоматизации производства листового металла. А в этой цели нет места полумерам или излишне сложным, неадаптированным к цеху системам. Нужен инструмент. Надежный, понятный, ремонтопригодный. По сути, такой же, как и пресс, который он обслуживает.
Так на что же смотреть, когда рассматриваешь внедрение такого решения? Первое — не на паспортные скорости и нагрузки, а на историю применения в аналогичных задачах. Есть ли у поставщика реализованные проекты с тем же типом заготовок, в той же среде? Второе — на открытость системы. Сможете ли вы самостоятельно поменять программу, подключить свой датчик, интегрировать его в свою SCADA? Или вы покупаете ?черный ящик?, который можно настроить только силами специалиста производителя?
Третье, и, возможно, главное — на подход к решению проблемы. Продают ли вам просто железо, или же проводят аудит процесса, предлагают варианты оснастки, берут на себя ответственность за цикл и интеграцию? Когда видишь, что компания уделяет внимание обучению персонала и развивает комплексные решения, как это делает Besco Machine Tool Limited, это говорит о системном подходе. В конечном счете, 2-осевой робот-манипулятор — это не звезда шоу, а трудяга в цеху. Его ценность определяется не технической изощренностью, а количеством безотказно произведенных деталей и спокойствием технолога, который знает, что этот узел линии не подведет.
Поэтому, возвращаясь к началу, главное — избавиться от заблуждения, что это ?недоробот?. Это другой инструмент для другой работы. И когда задача определена верно, он оказывается самым эффективным и, что немаловажно, самым здравым с точки зрения инвестиций решением в парке оборудования для автоматизации.