info@bescomt.com
+86-13181986275
info@bescomt.com
+86-13181986275

Когда слышишь ?штамповочный робот для подачи?, многие сразу представляют себе стандартного шестиосевого манипулятора, заботливо устанавливающего заготовку под пресс. На деле же — это целая система, где ?робот? часто лишь часть, и самая простая. Основная головная боль — интеграция, синхронизация с тактом пресса, обеспечение бесперебойной подачи именно ваших, часто неидеальных, листов или полос. Слишком много раз видел, как купили ?крутого робота?, а он простаивает, потому что система ориентации заготовки не справляется с маслом или деформацией кромки.
В теории всё гладко: робот берёт, кладёт, пресс штампует. На практике первый же вопрос — откуда брать? Если это отдельные листы из паллеты, нужна система распаковки и вакуумная захватная система, которая не сорвёт верхний лист, когда он прилип к следующему из-за смазки. Часто недооценивают этот момент. У нас на одном из первых проектов были постоянные сбои именно на этом этапе — пришлось переделывать всю схему захвата и вводить дополнительный этап пневматического отдува.
Второй момент — позиционирование. Датчики, конечно, стоят, но если заготовка после резки имеет заусенец или подогнута, робот может упереться и сбить программу. Приходится либо ужесточать контроль на предыдущей операции, либо закладывать в траекторию робота ?поисковые? движения с обратной связью, что увеличивает время цикла. Это тот самый компромисс между скоростью и надёжностью, который решается не в каталоге оборудования, а прямо у пресса, с ноутбуком и кувалдой под рукой.
И третий, самый важный аспект — безопасность. Ограждения, световые барьеры, дублирующие системы остановки. Штамповочный робот работает в опасной зоне. Любая, даже самая умная, система подачи должна иметь приоритет на остановку по сигналу от пресса. Видел решения, где эту связь делали по сети — вроде бы современно, но при малейших помехах в цехе возникали задержки, что недопустимо. Лучше старые добрые прямые кабельные связи с релейной логикой, пусть и менее ?интеллектуально?.
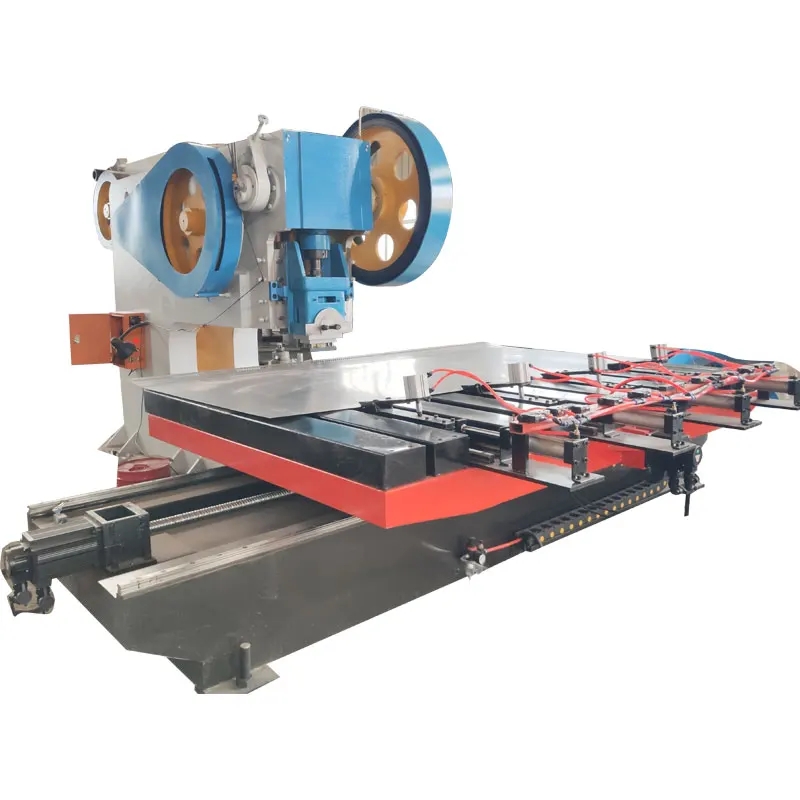
Хороший пример — история с внедрением линии для штамповки деталей корпуса. Заказчик хотел полный цикл: подача полосы, прокатка, штамповка, выгрузка. Робот-податчик был выбран с большим запасом по грузоподъёмности. Казалось бы, что может пойти не так?
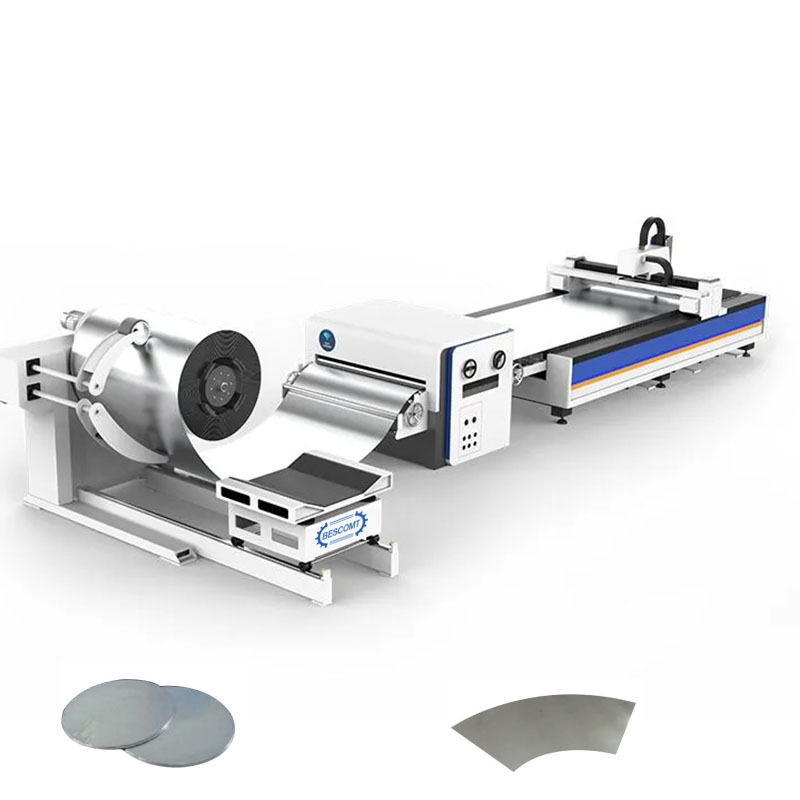
Проблема оказалась в самом начале — в разматывателе. Рулонная сталь, особенно тонколистовая, после размотки имеет остаточную кривизну (память материала). Робот, захватывая край для подачи в правильную позицию, сталкивался с тем, что лист ?уползал? в сторону. Стандартные направляющие ролики не помогали, так как нужно было сохранять поверхность чистой от царапин. Пришлось совместно с инженерами поставщика, Besco Machine Tool Limited (их сайт — https://www.bescomt.ru), разрабатывать систему мягкого вытягивания с плавающим позиционированием. Они, к слову, как раз из тех, кто понимает проблему не по каталогам, а по опыту сборки своих штамповочных прессов и автоматических систем подачи. Их подход — сначала анализ материала заказчика, потом предложение — спас много времени.
В итоге, решение нашли в комбинации: доработанный разматыватель с активным выравниванием плюс робот с системой зрения для финальной коррекции позиции непосредственно перед захватом. Это увеличило стоимость проекта, но зато обеспечило стабильность. Без такого комплексного взгляда со стороны интегратора, который знает и про роботов, и про металл, проект бы забуксовал.
Самостоятельный робот для подачи — бесполезная железка. Его ценность раскрывается только в связке. Как он общается с прессом? По цифровым входам/выходам (I/O), по Profinet, Ethernet/IP? Как получает команду, что пресс готов к приёму новой заготовки? По концевику на ползуне? По сигналу от ЧПУ пресса?
Здесь часто возникает соблазн сделать максимально цифровую и гибкую систему. Но на производстве, где вибрация, металлическая пыль, электромагнитные помехи от сварочных аппаратов, надёжность простых дискретных сигналов иногда перевешивает. Однажды столкнулся с ситуацией, когда сетевое соединение между контроллером робота и ЧПУ пресса теряло пакеты данных раз в несколько часов. Ошибка была случайной, пресс мог впустовать ударить по уже занятой оснастке. Искали неделю. В итоге перевели обмен на базовые сигналы ?готов/не готов? через реле — проблема исчезла.
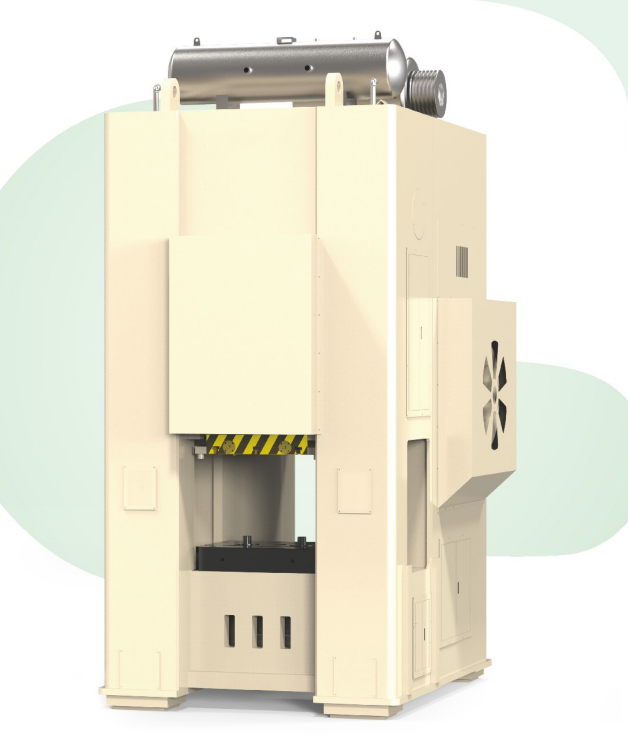
Поэтому, выбирая решение, важно смотреть не на список функций, а на то, как поставщик подходит к интеграции. Компании вроде Besco, которые сами производят и прессы, и системы автоматизации, здесь в выигрышном положении. Они поставляют не набор устройств, а готовый технологический узел, где всё уже ?притёрто? друг к другу. На их производственной площадке в 14 000 кв. м. как раз и происходит эта самая сборка и обкатка комплексных решений для штамповки металла, о чём говорит их философия стать лучшим поставщиком для автоматизации.
Все хотят сэкономить. Частая мысль: ?Возьмём робота подешевле, а систему подачи сделаем сами, силами КБ?. В единичных случаях, для неответственных деталей, это может сработать. Но для серийного, бесперебойного производства — путь к постоянным простоям.
Дешёвый робот часто имеет менее жёсткую конструкцию, что сказывается на точности повторного позиционирования после тысяч циклов. А для подачи под пресс точность — всё. Разброс даже в полмиллиметра может привести к браку или поломке оснастки. Экономия на этапе покупки оборачивается потерями на переналадках и ремонте.
Кроме того, есть вопрос сервиса и запчастей. Универсальные промышленные роботы — это одно. А специализированный штамповочный робот для подачи от производителя, который фокусируется на кузнечно-штамповочном оборудовании (как Besco Machine Tool Limited), — другое. В последнем случае вы получаете не только железо, но и глубокое понимание техпроцесса от партнёра. Их служба поддержки будет знать типичные проблемы именно в штамповочных цехах, а не абстрактные ошибки сервоприводов.
Сейчас тренд — на гибкие производства. Нужно, чтобы одна линия могла штамповать разные детали малыми партиями. Это ставит новые задачи перед системой подачи. Робот здесь — идеальное решение, так как его программу можно быстро сменить.
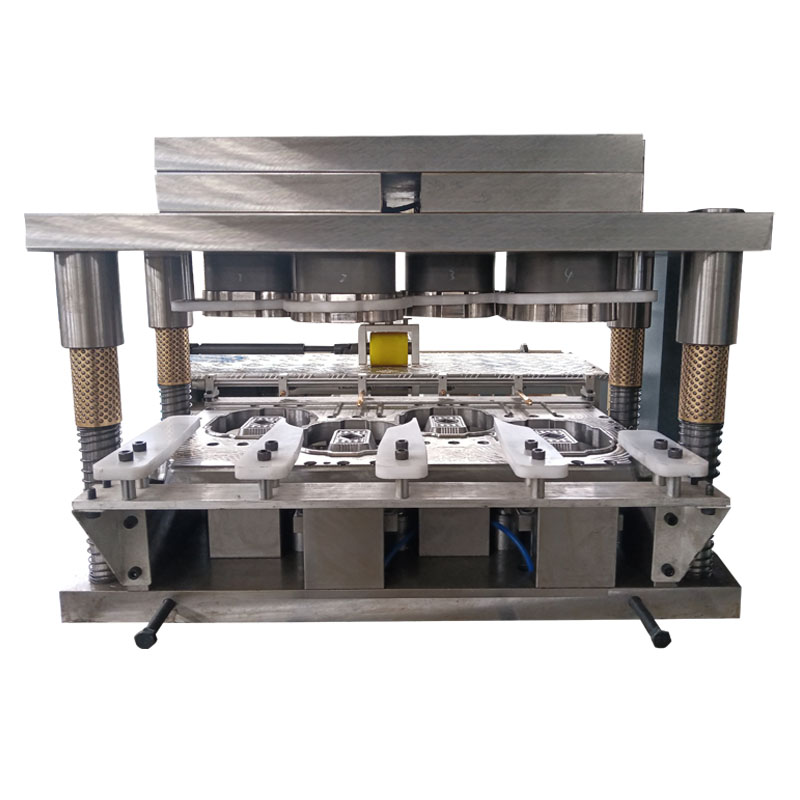
Но снова упираемся в ?околороботовые? системы. Как быстро менять захватные устройства (схваты)? Как организовать подачу разных по размеру и форме заготовок? Идеал — это система с автоматической сменой схватов и интеллектуальной системой зрения, которая определяет тип заготовки в паллете и корректирует программу робота на лету. Такие решения уже есть, они дороги, но для некоторых производств окупаются за счёт сокращения времени переналадки с часов до минут.
Компании, которые инвестируют в R&D, как та же Besco, объединяющая исследования, производство и продажи, уже предлагают такие комплексные пакеты. Их разработка различных комплектов решений для производственных линий — ответ на этот запрос рынка. Важно не просто продать робота, а предложить конфигурацию, которая будет расти вместе с потребностями цеха.
В итоге, возвращаясь к началу. Штамповочный робот для подачи — это не игрушка и не волшебная палочка. Это сложный узел, эффективность которого на 90% определяется грамотностью его интеграции в существующий или проектируемый техпроцесс. Его выбор — это всегда диалог между технологом производства и инженером-интегратором, который должен говорить на одном языке — языке практических проблем у пресса, а не красивых спецификаций. И именно в этом диалоге рождаются те решения, которые работают годами без сюрпризов.