info@bescomt.com
+86-13181986275
info@bescomt.com
+86-13181986275

Когда говорят ?робот-манипулятор для пресса?, многие сразу представляют себе ту самую механическую руку, которая хватает заготовку и перекладывает её. На деле же, если копнуть поглубже, это лишь вершина айсберга. Основная сложность и ценность лежит не в самом манипуляторе, а в его интеграции в технологический процесс — в синхронизации с тактом пресса, в надёжности захвата под конкретную деталь, в алгоритмах, которые предотвращают столкновение и простои. Частая ошибка — покупать ?робота? как отдельное устройство, а потом месяцами пытаться заставить его работать с устаревшим гидравлическим прессом, у которого нет чёткого интерфейса для внешнего управления. Сам через это проходил.
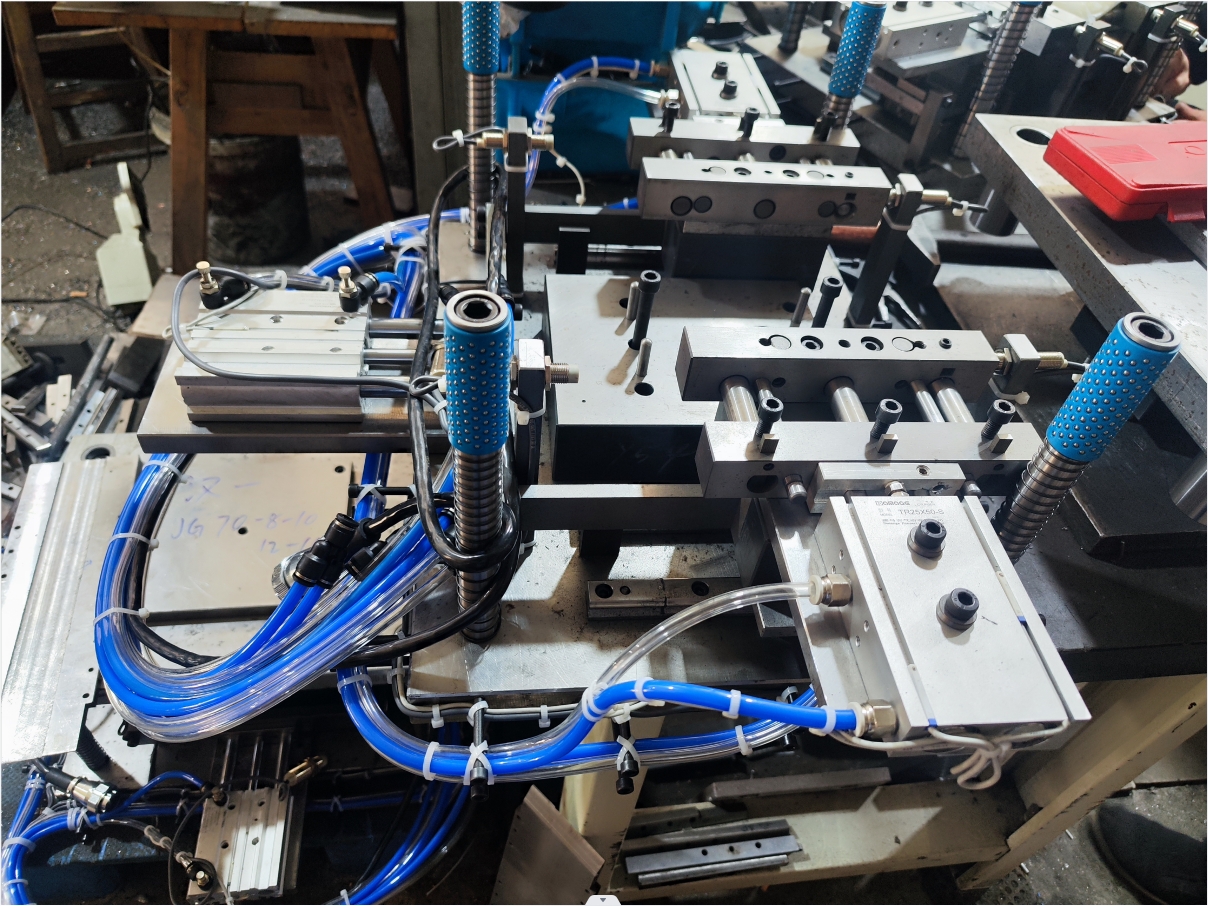
Изначальный импульс всегда один: заменить человека на монотонной, а иногда и опасной операции подачи заготовки в пресс и выгрузки готовой детали. Кажется, что всё просто — поставил манипулятор, запрограммировал траекторию, и готово. Но первый же реальный проект упирается в детали. Например, та же заготовка. Если это просто плоский лист — одно дело. А если это уже предварительно гнутый профиль или деталь с остаточной смазкой? Вакуумные захваты могут соскользнуть, магнитные — не всегда применимы. Приходится комбинировать или разрабатывать механические захваты с фиксаторами, что сразу усложняет конструкцию и требует дополнительных настроек.
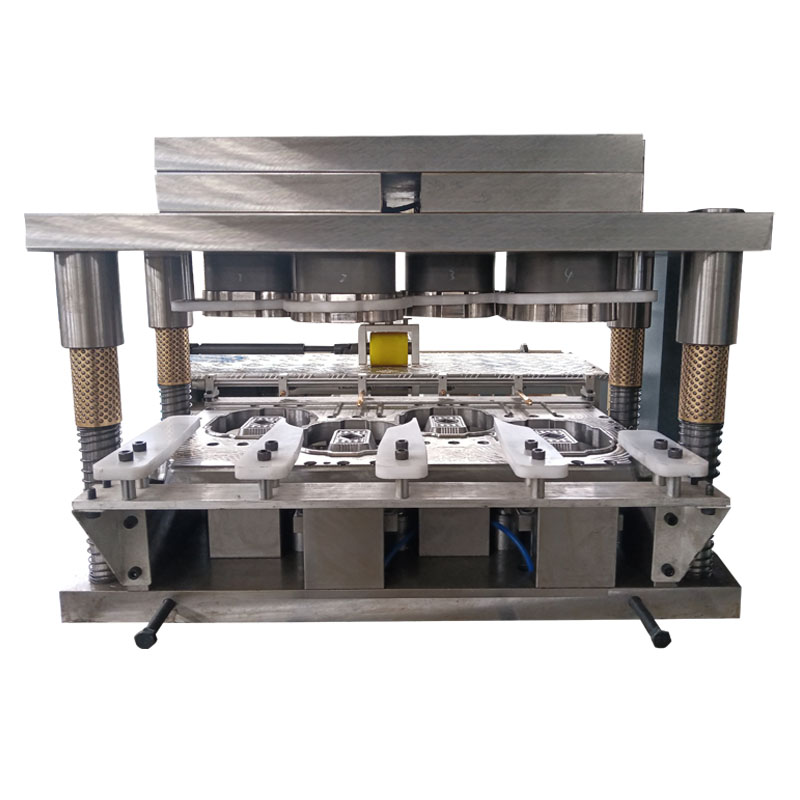
Ещё один нюанс, о котором часто забывают на старте, — это подготовка периферии. Сам робот-манипулятор для пресса — это исполнительное устройство. Ему нужна чётко организованная зона подачи (стол, конвейер, штабелёр) и такая же организованная зона выгрузки. Если заготовки подаются вразнобой или готовые детали не отвозятся вовремя, весь цикл встаёт. Приходится проектировать всю ячейку целиком, а не просто ?прикручивать? робота к существующему станку. Здесь как раз ценен опыт компаний, которые занимаются не просто станками, а комплексными решениями. Взять, к примеру, Besco Machine Tool Limited — их подход к разработке линий для штамповки металла подразумевает именно системную интеграцию, где манипулятор является частью отлаженного конвейера процессов, что видно по их портфолио на https://www.bescomt.ru.
И конечно, программная часть. Современные контроллеры позволяют прописывать сложные траектории и условия, но для этого нужен специалист, который понимает и в кинематике робота, и в специфике работы пресса. Иногда проще и надёжнее оказывается не самый ?навороченный? шестиосевой робот, а специализированный манипулятор для пресса с тремя-четырьмя степенями свободы, но заточенный под высокие скорости и жёсткие условия цеха — вибрацию, пыль, перепады температур.
Это отдельная большая тема для размышлений. Классический гидравлический пресс, особенно в тяжелой штамповке, — это мощно, но часто ?медленно? и с нелинейным управлением. Внедрить туда робота-манипулятора сложнее, потому что нужно точно ловить момент открытия штампа и момент, когда ползун уже точно в верхней мёртвой точке. Задержка в доли секунды — и либо робот врежется в пресс-форму, либо пресс начнёт новый ход, не дождавшись выгрузки. Тут требуется не просто сигнал ?вкл/выкл?, а полноценный обмен данными между контроллером пресса и контроллером робота.
С кривошипно-шатунными прессами, на первый взгляд, проще — цикл более предсказуем. Но и тут есть подводные камни. Высокая скорость работы таких прессов требует от манипулятора феноменальной скорости и точности старта-стопа. Иногда экономически выгоднее выглядит не отдельный робот, а встроенная система автоматической подачи, та же автоматическая система подачи, которая является частью пресса. Но её недостаток — в ограниченной гибкости. Перейти с одной детали на другую — это переналадка, иногда почти полная разборка механизма подачи. А робот-манипулятор, особенно с системой смены захватов, справляется с этим быстрее.
Лично сталкивался с ситуацией на одном из заводов, где пытались автоматизировать линию резки и последующей гибки. Поставили робота между механическими ножницами и гибочным станком. Всё шло хорошо, пока не начали работать с тонким оцинкованным листом. После резки края были с заусенцами, робот захватывал лист, и при переносе эти заусенцы царапали поверхность. Пришлось в срочном порядке дорабатывать захваты, добавлять мягкие накладки и менять точки контакта. Мелочь, а остановила линию на неделю. Это к вопросу о том, что автоматизация — это всегда глубокий анализ всего технологического цепочки, а не одного участка.
Хочу привести пример неудачи, который многому научил. Был проект по автоматизации выгрузки штампованных крышек из пресса. Деталь небольшая, но горячая сразу после выхода из штампа. Поставили стандартного робота-манипулятора с термостойким захватом. Всё работало на испытаниях. Но в реальной работе, при увеличении темпа, выяснилось, что деталь иногда не до конца отделяется от облоя и вытаскивается из пресса ?с хвостом?. Робот, слепо следуя программе, тащил эту связку и ронял её на конвейер, вызывая затор и риск повреждения оборудования. Решение оказалось не в роботе, а в доработке штампа и добавлении простейшего оптического датчика, который проверял, чисто ли отделилась деталь, прежде чем давать команду роботу на захват. Без этого датчика вся система была нежизнеспособна.
Выбирая робота-манипулятора для пресса, первым делом смотришь на грузоподъёмность и радиус действия. Это правильно. Но дальше начинается самое важное. Первое — это совместимость интерфейсов. Умеет ли контроллер робота ?разговаривать? с тем типом ЧПУ или системой управления, которая стоит на вашем прессе? Если нет, то стоимость и сроки интеграции взлетят в разы.
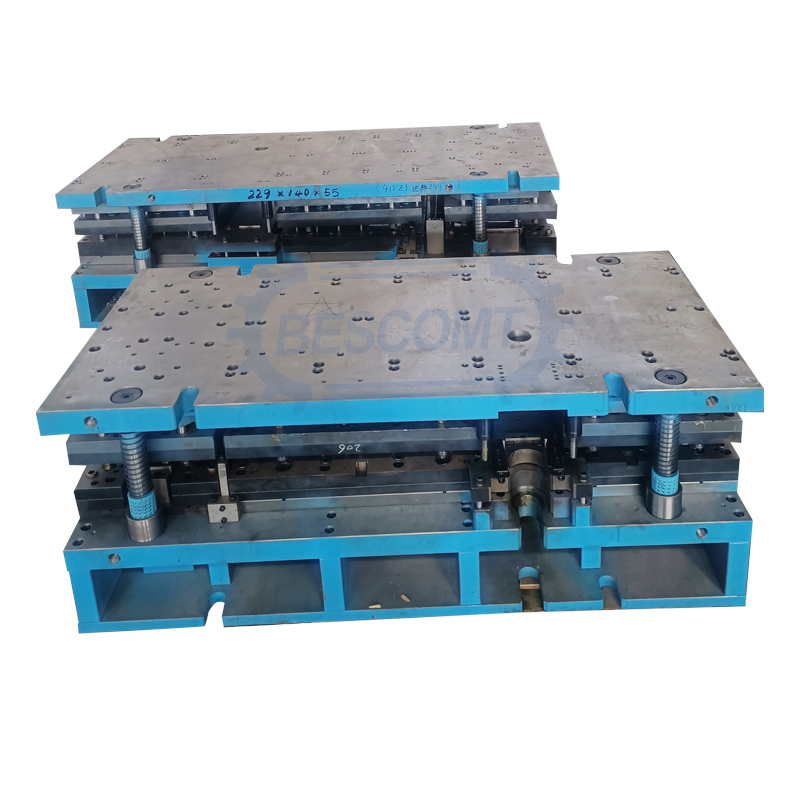
Второе — это повторяемость позиционирования. Для штамповки, где важна точность установки заготовки в очаг штампа, даже миллиметровый люфт может привести к браку. Нужно смотреть технические характеристики очень придирчиво, а лучше — тестировать на своих деталях. Третье — защита. Цех — не лаборатория. Обязательна высокая степень защиты IP от пыли и влаги, а также устойчивость к вибрациям. Некоторые ?облегчённые? модели, отлично работающие в чистых условиях, быстро выходят из строя рядом с мощным штамповочным станком.
И здесь снова возвращаемся к важности поставщика, который понимает контекст. Компания, которая сама производит и прессы, и сопутствующее оборудование, как Besco Machine Tool Limited, с её почти двадцатилетним опытом в кузнечно-штамповочном оборудовании, скорее предложит манипулятор, уже адаптированный под эти жёсткие условия. Их акцент на комплексные решения для производственных линий говорит о том, что они мыслят именно системно, а не продают отдельные ?коробки?. Это критически важно.
Сейчас тренд смещается в сторону ещё большей гибкости. Производства требуют быстрой переналадки под мелкие серии. Это ставит новые задачи перед роботами-манипуляторами для пресса. Востребованы системы машинного зрения, которые позволяют роботу самостоятельно позиционироваться относительно немного смещённой заготовки на столе. Актуальными становятся решения, где один робот обслуживает несколько прессов или совмещает операции — например, после выгрузки проводит простейший контроль геометрии или маркировку.
Ещё один пласт — это сбор данных. Современный манипулятор — это источник информации о количестве циклов, времени работы, возникновении ошибок. Интеграция этих данных в общую систему MES позволяет не просто автоматизировать физический труд, но и оптимизировать весь процесс планирования и обслуживания оборудования. Это уже следующий уровень, до которого многим ещё далеко, но двигаться нужно именно в эту сторону.
В итоге, возвращаясь к началу, робот-манипулятор для пресса — это не волшебная палочка для автоматизации. Это сложный технический узел, эффективность которого на 90% определяется качеством проектирования всей рабочей ячейки, глубиной понимания технологии и правильным выбором компонентов. Успех приходит тогда, когда инженер мыслит не категориями ?купить робота?, а категориями ?решить задачу по надёжной и гибкой автоматизации конкретной операции штамповки?. И в этом смысле опыт и комплексный подход таких игроков рынка, как Besco, который объединяет в себе разработку, производство и продажи, оказывается бесценным ресурсом для тех, кто хочет не просто ?поставить робота?, а получить реально работающую и окупаемую систему.