info@bescomt.com
+86-13181986275
info@bescomt.com
+86-13181986275

Когда говорят ?робот-манипулятор?, многие сразу представляют себе изолированную механическую руку, выполняющую цикличные движения. Это, пожалуй, самый распространённый упрощённый взгляд. На деле же, его ценность и сложность определяются тем, как он вписывается в конкретный технологический процесс, насколько его ?интеллект? — то есть система управления и обратной связи — адаптирован под реальные, а не идеальные условия. Без этого он так и останется дорогой игрушкой.
Частая ошибка на старте — выбор манипулятора исходя только из паспортных данных: грузоподъёмность, радиус действия. Это необходимо, но недостаточно. Ключевой момент — это интерфейс с существующим оборудованием. Допустим, нужно автоматизировать подачу заготовок на гибочный станок. Сам робот-манипулятор может быть прекрасен, но если его система управления не может получить сигнал от датчика положения пресса или не имеет протокола обмена с ЧПУ станка, вся затея останавливается. Приходится городить промежуточные контроллеры, что удорожает и усложняет наладку.
У нас был опыт интеграции с линией резки. Манипулятор должен был снимать лист после плазменной резки. Всё работало в тестовом режиме, но в реальности стол после резки ?вело?, появлялись микродеформации. Датчики манипулятора, рассчитанные на чёткое положение, теряли точку захвата. Пришлось дорабатывать систему визирования, добавлять компенсацию по данным камеры. Это тот самый случай, когда теория сталкивается с практикой цеха — пыль, температура, вибрация.
Именно поэтому компании, которые глубоко погружены в конкретное металлообрабатывающее оборудование, имеют преимущество. Они понимают контекст. Например, Besco Machine Tool Limited, которая много лет занимается кузнечно-прессовым и штамповочным оборудованием, разрабатывая решения ?под ключ?. Их подход к роботу-манипулятору — не как к отдельному продукту, а как к элементу своей автоматической системы подачи для штамповочных прессов. Это значит, что вопросы синхронизации, безопасности и управления уже решены на системном уровне.
Ещё один момент для размышлений — специализация. Универсальные шестиосевые роботы-манипуляторы хороши для сборочных операций, но для тяжёлых, часто однотипных операций вроде перекладки поковок или подачи листа иногда избыточны. Здесь часто выигрывают более простые, но мощные декартовы системы или портальные манипуляторы. Их механика проще, ремонтопригодность выше, а цена часто ниже.
Но и у этого пути есть ловушка. Жёсткая специализация снижает гибкость линии. Если сегодня вы штампуете одну деталь, а завтра модель меняется, потребуется переналадка. Сложный робот можно перепрограммировать, а специализированный механизм — возможно, нет. Выбор всегда сводится к прогнозу: насколько часто будет меняться номенклатура? Ответ на этот вопрос экономит миллионы.
В контексте компании Besco, с её 20-летним опытом, видно, что они идут по пути создания комплектных решений для определённых классов задач — линий штамповки металла. Их робот-манипулятор (или автоматическая система подачи) изначально проектируется для работы с их же гидравлическими прессами и ножницами. Это даёт надёжность, но, вероятно, накладывает ограничения на интеграцию со сторонним оборудованием. Для клиента, который покупает линию целиком, это плюс. Для того, кто хочет автоматизировать старый станок, — возможное осложнение.
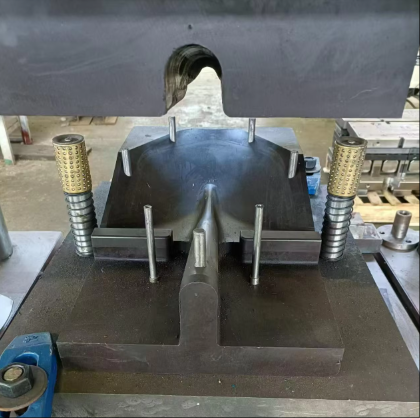
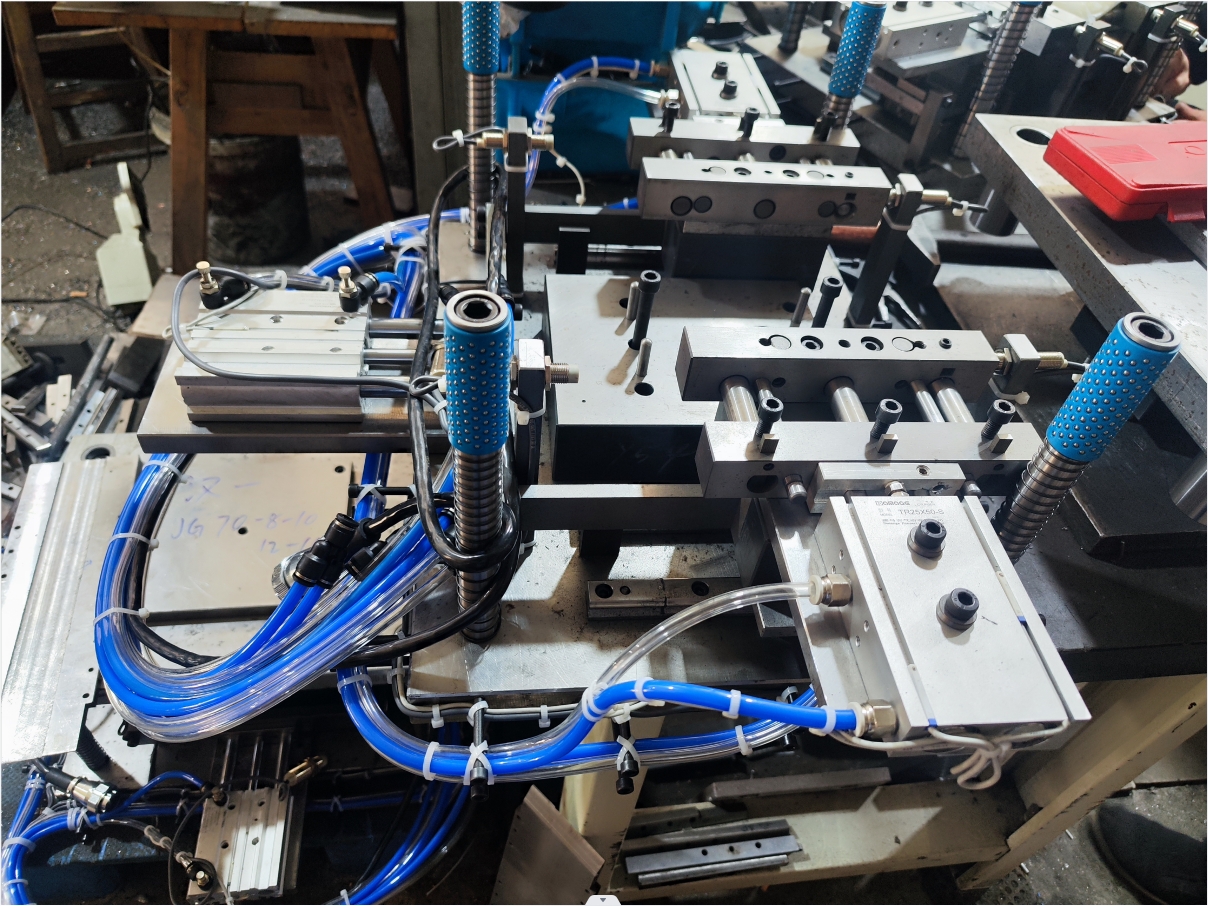
Хочется остановиться на мелочах, которые в паспорте не пишут, но которые съедают кучу времени. Первое — это оснастка, захваты. Самый совершенный манипулятор бесполезен со скользящим или деформирующим заготовку захватом. Для листового металла часто используют вакуумные присоски. Казалось бы, всё просто. Но если лист масляный или имеет перфорацию, вакуумная система даёт сбой. Приходится комбинировать — вакуум плюс механические зажимы. И каждый такой нюанс требует дополнительных датчиков контроля: захватил/не захватил, сместилась ли деталь.
Второе — траектория. Особенно при работе в стеснённых условиях, рядом с прессом. Недостаточно просто записать движение из точки А в Б. Нужно построить траекторию так, чтобы исключить даже малейшую возможность столкновения при любом сбое. А ещё учесть инерцию. Быстрый робот-манипулятор с тяжёлой заготовкой в конце хода может ?пронести? её на несколько миллиметров. Для точной установки в штамп это критично. Приходится или снижать скорость на финальном участке, или вводить коррекцию по обратной связи.
Третье — человек в контуре. Как оператор взаимодействует с системой? Простой аварийный стоп — это стандарт. Но нужны ещё и режимы ручного позиционирования, упрощённый интерфейс для смены программы. Если для этого требуется вызывать инженера-программиста, эффективность всей автоматизации падает. В идеале, смена номенклатуры должна занимать у оператора несколько минут.
Приведу пример неочевидной проблемы. Мы внедряли манипулятор для загрузки заготовок в печь с последующей передачей на пресс. Температурный режим был ключевым. Сам робот стоял на расстоянии, но его ?рука? регулярно заходила в зону высокого инфракрасного излучения. Через пару недель интенсивной работы начались сбои в энкодерах на ?запястье?. Оказалось, что тепловое излучение, не ощутимое сразу, постепенно нагревало узлы и влияло на точность датчиков. Пришлось проектировать и устанавливать простой, но эффективный теплоотражающий экран из фольгированного материала. Ни один каталог этого не предскажет.
Это к вопросу о том, почему важна не просто продажа железа, а комплексное решение. Компания, которая производит и прессы, и линии, и роботы-манипуляторы для них, как Besco, скорее всего, уже сталкивалась с подобными проблемами на своих испытаниях. Их оборудование, возможно, изначально спроектировано с учётом таких тепловых или вибрационных нагрузок. Это и есть добавленная стоимость опыта.
Или другой аспект — обслуживание. Кто и как будет менять масло в редукторах, проверять натяжение ремней? Если для доступа к сервомотору нужно разобрать полкожуха, а это 4 часа работы, — это плохая конструкция. Хорошая система спроектирована так, чтобы техобслуживание было быстрым и простым. Это напрямую влияет на коэффициент использования оборудования.
Сейчас тренд — не в наращивании скорости или грузоподъёмности, а в ?очувствлении? и упрощении программирования. Системы машинного зрения становятся дешевле и надёжнее. Это позволяет отказаться от жёсткой привязки к координатам и работать по ?образу?. Манипулятор видит деталь, лежащую неидеально ровно, и корректирует траекторию захвата. Это революция для мелкосерийного производства.
Второе — коллаборативные возможности. Пока это больше маркетинг для лёгких задач, но идея, что робот может безопасно работать рядом с человеком без клетки, очень привлекательна для перестройки старых цехов, где нет места для больших охраняемых зон. Но для тяжёлого штамповочного производства это, конечно, пока не актуально — здесь безопасность строится на физическом ограждении.
И третье — цифровой двойник. Внедрение новой ячейки с роботом-манипулятором теперь можно сначала отладить в виртуальной среде, смоделировать циклы, выявить коллизии. Это резко сокращает время пусконаладки на реальном объекте. Для интеграторов, которые работают удалённо, это просто спасение. Думаю, все серьёзные игроки, включая Besco, уже активно используют или внедряют такие технологии в свои процессы проектирования линий.
В итоге, возвращаясь к началу. Робот-манипулятор — это не волшебная палочка. Это сложный узел, чья эффективность на 90% определяется тем, насколько глубоко он интегрирован в технологическую цепочку и насколько учтены все ?неидеальности? реального производства. И успех приходит тогда, когда его выбирают и внедряют люди, понимающие не только робототехнику, но и ту самую отрасль, куда он ставится — будь то штамповка, сварка или сборка.