info@bescomt.com
+86-13181986275
info@bescomt.com
+86-13181986275

Когда говорят ?робот-манипулятор для металлоштамповки?, многие сразу представляют себе просто механическую руку, которая берет заготовку и кладет её в пресс. На деле, если подходить с такой упрощённой логикой, можно наломать дров. Ключевое здесь — интеграция в процесс, а не сам по себе манипулятор. Это звено, которое должно работать в такт с прессом, системой подачи, иногда даже с линией резки. И вот этот ?такт? — он часто и становится камнем преткновения.
Внедряли мы как-то систему с роботом-манипулятором для штамповки корпусных деталей. Заказчик хотел уйти от ручного труда, повысить темп. Взяли, казалось бы, надёжного ?шестиосевого? робота, с хорошей грузоподъёмностью. Смонтировали, запрограммировали базовые движения — берёт заготовку из стопки, позиционирует в пресс, забирает готовую деталь, складывает. Всё работает. Но когда запустили в реальном цикле, начались проблемы. Первая — ориентация заготовки. Лист после лазерной резки или гильотины может иметь микрозаусенцы. Робот захватывал его вакуумными присосками, и при быстром перемещении деталь иногда проворачивалась буквально на пару градусов. В пресс-форму она входила, но с лёгким перекосом. Результат — брак, задиры на оснастке.
Пришлось глубоко лезть в настройки захвата и траектории. Добавили систему датчиков контроля наклоня, по сути, простые оптические сенсоры, которые перед самой установкой в пресс делали ?последнюю проверку?. Это увеличило время цикла на 0.3 секунды, но брак ушёл. Вот такой нюанс, о котором в каталогах роботов не пишут. Там указаны скорость, повторяемость, радиус действия. А вопрос ?а что он держит и в каких условиях? — это уже к системному интегратору.
Ещё один момент — пыль и масло. Цех металлоштамповки — не чистая комната. Окалина, смазка для пресс-форм, конденсат. Электроника и механика робота-манипулятора должны быть защищены соответствующим образом. Сталкивались с ситуацией, когда в сервоприводах накапливалась металлическая пыль, что в итоге приводило к сбоям энкодеров. Решение — регулярное обслуживание, плюс установка дополнительных кожухов в зоне, близкой к прессу. Это тоже дополнительные расходы и остановки, которые надо закладывать в план изначально.
Часто при выборе смотрят на максимальную грузоподъёмность и скорость. Но для штамповки критична не столько максимальная скорость на траектории, сколько скорость и точность позиционирования в конечных точках — точка забора и точка установки. Особенно если используется сложная оснастка с несколькими позициями или требуется переворот детали между ходами пресса. Здесь важна не ?повторяемость? вообще, а повторяемость в условиях вибрации от работы тяжёлого пресса. Наш опыт показал, что иногда лучше взять робота с чуть меньшими паспортными скоростями, но с более жёсткой конструкцией и качественными редукторами — он в таких условиях окажется стабильнее.
Кстати, о перевороте. Для некоторых операций глубокой вытяжки или последовательной штамповки деталь нужно перевернуть. Можно использовать двусторонний захват или спроектировать траекторию с перехватом. Мы пробовали оба варианта. Двусторонний захват экономит время, но он тяжелее, сложнее, требует больше места. А перехват — это дополнительная точка позиционирования и риск уронить деталь. Выбор всегда зависит от геометрии детали и такта. Однажды для штамповки кронштейна остановились на варианте с простым поворотным устройством на самом захвате — не самое элегантное решение, но дешёвое и безотказное.
Важный аспект — безопасность. Когда робот-манипулятор работает в клети с прессом, логика блокировок должна быть абсолютно надёжной. Сигнал ?пресс готов к работе? и ?робот вышел из опасной зоны? — это святое. Лучше использовать аппаратные реле и несколько независимых каналов подтверждения, а не только программные сигналы из ПЛК. Один раз видели аварию (к счастью, без жертв) из-за залипания контакта в концевике. После этого всегда настаиваем на резервировании критических цепей.
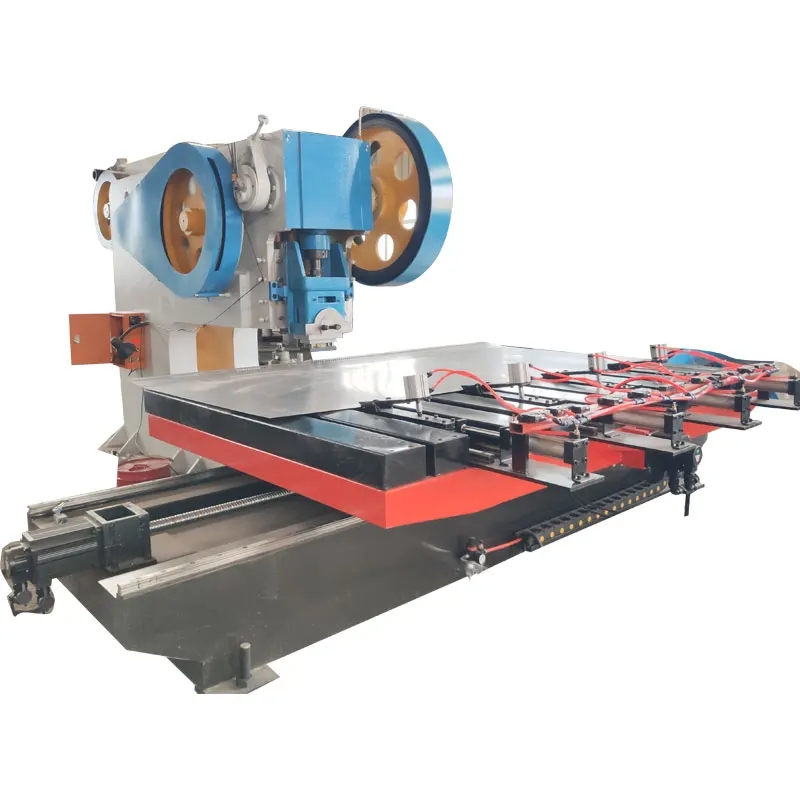
Сам по себе робот — это железо и софт. Его ценность раскрывается в системе. Вот, например, компания Besco Machine Tool Limited (сайт: https://www.bescomt.ru), которая занимается кузнечно-штамповочным оборудованием, правильно делает акцент на комплектные решения. Потому что их робот-манипулятор для металлоштамповки должен быть изначально ?знаком? с их же прессами, ножницами, системами подачи. Они как раз предлагают различные комплекты решений для производственных линий, что снимает массу головной боли с интеграции. Когда всё оборудование от одного поставщика, который понимает весь цикл, проще согласовать интерфейсы, скорости, протоколы.
На их площадке в 14 000 кв. м есть возможность и производить, и тестировать такие комплексные решения. Это важно. Можно привезти свою оснастку или деталь и посмотреть, как будет работать вся связка в условиях, близких к реальным. Для инженера, который отвечает за внедрение, такая возможность — бесценна. Не по каталогу выбирать, а увидеть вживую.
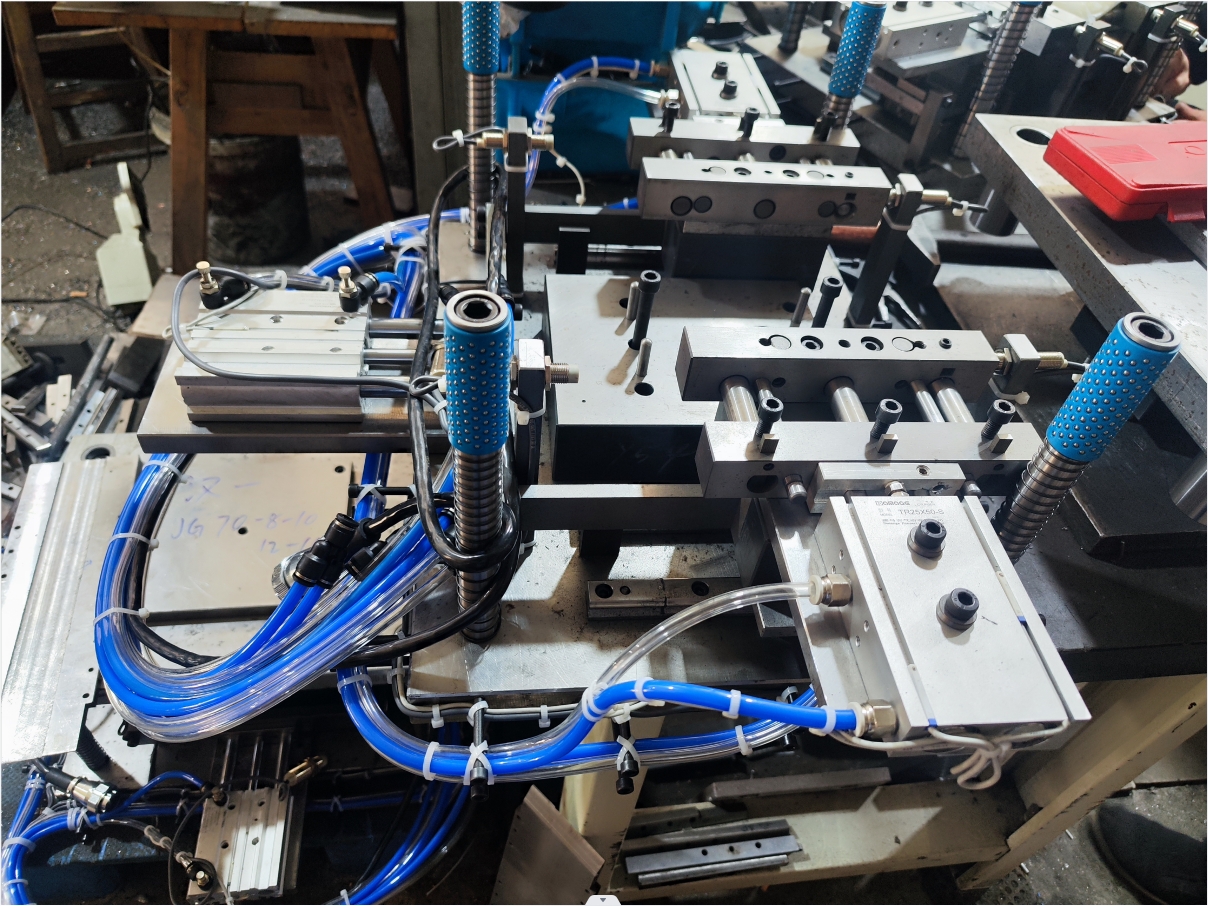
В их ассортименте есть и автоматические системы подачи, которые логично стыкуются с манипуляторами. Часто проблема именно в стыке: как обеспечить бесперебойную подачу заготовок из стопки или с конвейера к зоне захвата робота. Если этот участок ?бутылочное горлышко?, то вся скорость робота теряет смысл. Нужно проектировать линию как единый организм. Опыт Besco в разработке таких линий почти 20 лет, судя по описанию, как раз говорит о том, что они прошли этот путь и понимают важность именно системного подхода, а не просто продажи станков по отдельности.
Внедрение автоматизации — это инвестиция. И кроме стартовых затрат на робота, захват, ограждение и программирование, есть постоянные. Энергопотребление — не самое большое, но его стоит считать. Техническое обслуживание — регулярная замена масла в редукторах, проверка кабелей, чистка сенсоров. Если цех не очень чистый, интервалы обслуживания могут сокращаться.
Но главная скрытая статья — это адаптация под новые детали. Если производство серийное, и деталь не меняется годами, то проблем нет. Но если есть частая смена номенклатуры, то каждый раз нужно перенастраивать захват, перепрограммировать траектории, возможно, менять некоторые элементы оснастки. Это требует квалификации оператора/наладчика. Компании, которые продают решения, как та же Besco Machine Tool Limited, часто проводят обучение для персонала клиента — это критически важно. Без обученного персонала даже самая совершенная система быстро превратится в груду металла.
В их компании, как указано в описании, уделяют внимание тренингам, и сотрудники стремятся стать лучшими в своей нише. Это правильный вектор. Потому что в конечном счёте, надёжность системы определяют люди, которые её обслуживают и управляют ею. Можно поставить самого дорогого робота, но если наладчик не понимает, как компенсировать износ присосок или как настроить точку подхода, чтобы избежать столкновения при смене штампа, толку не будет.
Сейчас тренд — не просто автоматизация ради замены человека, а повышение гибкости. Робот-манипулятор в штамповочном производстве всё чаще становится частью гибкой ячейки. К нему могут подаваться разные заготовки, а система машинного зрения помогает их идентифицировать и корректировать положение. Это следующий уровень, который позволяет экономить на переналадке.
Ещё один пласт — сбор данных. Современные роботы могут отдавать кучу информации: токи двигателей, температуру, количество циклов. Анализируя эти данные, можно прогнозировать необходимость техобслуживания, видеть износ захвата или понять, что деталь стала чуть толще (или тоньше), и скорректировать усилие захвата. Это уже переход к ?умному? производству.
Внедряя такие системы, нужно смотреть не только на сегодняшнюю задачу, но и на возможность такого апгрейда в будущем. Есть ли запас по коммуникациям (Ethernet, полевая шина), поддерживает ли контроллер робота подключение внешних сенсоров, насколько открыт его программный интерфейс. Это вопросы, которые стоит задавать поставщику, такому как Besco, сразу. Потому что компания, которая сама занимается разработками, обычно может предложить и более продвинутые, масштабируемые решения, а не только базовую комплектацию.
В итоге, возвращаясь к началу, робот-манипулятор для металлоштамповки — это не волшебная палочка, а сложный технический узел, эффективность которого на 90% определяется правильным выбором, грамотной интеграцией и квалифицированной эксплуатацией. И подход, при котором ты рассматриваешь его как часть единой технологической цепи — от чертежа до готовой детали — единственно верный. Остальное — путь к лишним затратам и разочарованиям.